¶ Wstęp
Urządzenie może być montowane we wszystkich pojazdach z instalacją 12V i 24V z minusem na masie.
¶ Kompletacja
System Skaut dostarczany jest w podstawowym zestawie zawierającym elementy przedstawione poniżej.
- urządzenie Skaut/Skaut-i/Skaut-2/Skaut-3 typ ST01, szt. 1

- wiązka kablowa X2 (nie dotyczy Skaut-i), szt. 1

- wiązka kablowa X1, szt. 1

- antena GPS, szt. 1

- antena GSM, szt. 1

Do podłączenia urządzenia mogą zostać użyte dodatkowe komponenty, które nie wchodzą w skład zestawu. Można je dobrać indywidualnie z szerokiej gamy powszechnie dostępnych elementów. Obejmują one m.in.:
- gniazda przekaźników, szt. 2

- przekaźniki, szt. 2

- pastylka Dallas, szt. 1

- czytnik pastylek Dallas, szt. 1

- przełącznik, szt. 1

- dioda sygnalizacyjna, szt. 1

¶ Montaż
Przed przystąpieniem do montażu zapoznaj się z informacjami przedstawionymi w niniejszym rozdziale.
¶ Uwagi ogólne dotyczące montażu
Urządzenie przeznaczone jest do pracy w temperaturze otoczenia od do .
Immobiliser powinien być montowany w przedziale pasażerskim lub bagażowym lub dowolnym innym miejscu, w którym zastosowany stopień szczelności obudowy (IP40) zapewni bezpieczeństwo pracy immobilisera.
¶ Opis złącz
Urządzenie posiada 2 złącza antenowe typu SMA, dwa wielostykowe złącza służące do podłączenia większości sygnałów wraz z zasilaniem oraz złącze audio typu RJ45 lub jack. Wejścia 2-stanowe jako poziom wysoki interpretują napięcie większe od 3V. Obciążalność wyjść cyfrowych wynosi 0.5A. W przypadku konieczności sterowania przekaźnikiem zalecamy zastosowanie diod zabezpieczających przed przepięciami. Poniżej znajduje się dokładny opis poszczególnych wyprowadzeń.
¶ Złącze X1 (Skaut 1-3)
| Nr pinu | Opis |
|---|---|
| 1-1 | Wyjście cyfrowe bit 0, OC 0.5A, umożliwia bezpośrednie podłączenie LED do masy |
| 1-2 | Magistrala 1WIRE |
| 1-3 | Wejście cyfrowe bit 1, stan niski 0V, wysoki >3V |
| 1-4 | Masa GND (dedykowana dla podłączenia zasilania) |
| 1-5 | Wyjście cyfrowe bit 1, OC 0.5A, umożliwia bezpośrednie podłączenie LED do masy |
| 1-6 | Wejście analogowe 2 (pływak paliwa) pomiar z zakresu 0V – 30V, |
| 1-7 | Wejście cyfrowe bit 0, stan niski 0V, wysoki >3V |
| 1-8 | Zasilanie VCC od +12V do +24V, wejście analogowe 0 |
¶ Złącze X2 (Skaut 1-3)
| Nr pinu | Opis |
|---|---|
| 2-1 | Wyjście cyfrowe bit 2, OC 0.5A |
| 2-2 | Wejście cyfrowe bit 5, stan niski 0V, wysoki >3V, lub wejście impulsowe (IMP1) |
| 2-3 | Wejście cyfrowe bit 3, stan niski 0V, wysoki > 3V |
| 2-4 | Wejście analogowe 3, pomiar z zakresu 0V – 30V, |
| 2-5 | Styk do podłączenia akumulatora podtrzymującego 6V, wejście analogowe 1 |
| 2-6 | Masa GND (dedykowana do podłączenia akumulatora) |
| 2-7 | Masa GND (uniwersalna) |
| 2-8 | Masa GND (dedykowana do RS232 lub J1708) |
| 2-9 | Magistrala CAN-L |
| 2-10 | Magistrala J1708 styk B |
| 2-11 | Wyjście cyfrowe bit 3, OC 0.5A |
| 2-12 | Wejście cyfrowe bit 4 stan niski 0V, stan wysoki >3V lub wejście impulsowe (IMP0) |
| 2-13 | Wejście cyfrowe bit 2, stan niski 0V, stan wysoki >3V |
| 2-14 | Wejście cyfrowe bit 6, stan niski 0V, stan wysoki >3V lub wejście częstotliwościowe (IMP2) |
| 2-15 | Wejście cyfrowe bit 7 stan niski 0V, stan wysoki >3V lub wejście częstotliwościowe (IMP3) |
| 2-16 | Magistrala RS232C wyjście (TXD) |
| 2-17 | Magistrala RS232C wejście (RXD) |
| 2-18 | Wyście zasilania VCC przez bezpiecznik 0.75A |
| 2-19 | Magistrala CAN-H |
| 2-20 | Magistrala J1708 styk A |
¶ Złącze Z1 (Skaut 4)
| Nr pinu | Opis |
|---|---|
| 1 | CAN L |
| 2 | CAN H |
| 3 | J1708 B+ lub RS485 B |
| 4 | J1708 A- lub RS485 A |
| 5 | 1 WIRE |
| 6 | AN 2 (0V - 30V) |
| 7 | DOUT 0 (typu OC 250mA max, podciąg 4,7K do VCC) |
| 8 | DIN 0 (0 dla <2.5V, 1 dla >3.5V), WAKE-UP (dla >10.5V) |
| 9 | GND |
| 10 | VCC (10.5V - 30V), AN 0 |
¶ Złącze Z2 (Skaut 4)
| Nr pinu | Opis |
|---|---|
| 1 | DOUT 3 (typu OC 250mA max) |
| 2 | DOUT 2 (typu OC 250mA max) |
| 3 | DOUT 1 (typu OC 250mA max, podciąg 4,7K do VCC) |
| 4 | AN 3 (0V - 30V) |
| 5 | GND |
| 6 | RS232C TxD |
| 7 | GND |
| 8 | RS232C RxD |
| 9 | BATT IN (6V – 8.4V), AN 1 |
| 10 | DIN 7 (0 dla <2.5V, 1 dla >3.5V), IMP 3 |
| 11 | DIN 6 (0 dla <2.5V, 1 dla >3.5V), IMP 2 |
| 12 | DIN 5 (0 dla <2.5V, 1 dla >3.5V), IMP 1 |
| 13 | DIN 4 (0 dla <2.5V, 1 dla >3.5V), IMP 0 |
| 14 | DIN 3 (0 dla <2.5V, 1 dla >3.5V) |
| 15 | DIN 2 (0 dla <2.5V, 1 dla >3.5V) |
| 16 | DIN 1 (0 dla <2.5V, 1 dla >3.5V) |
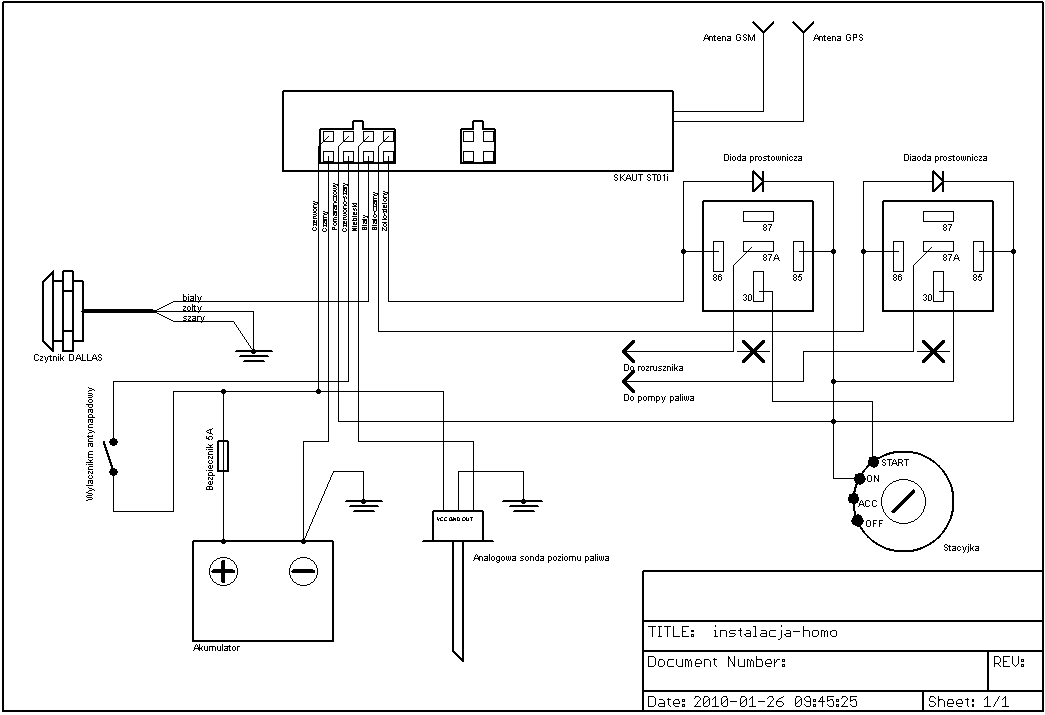
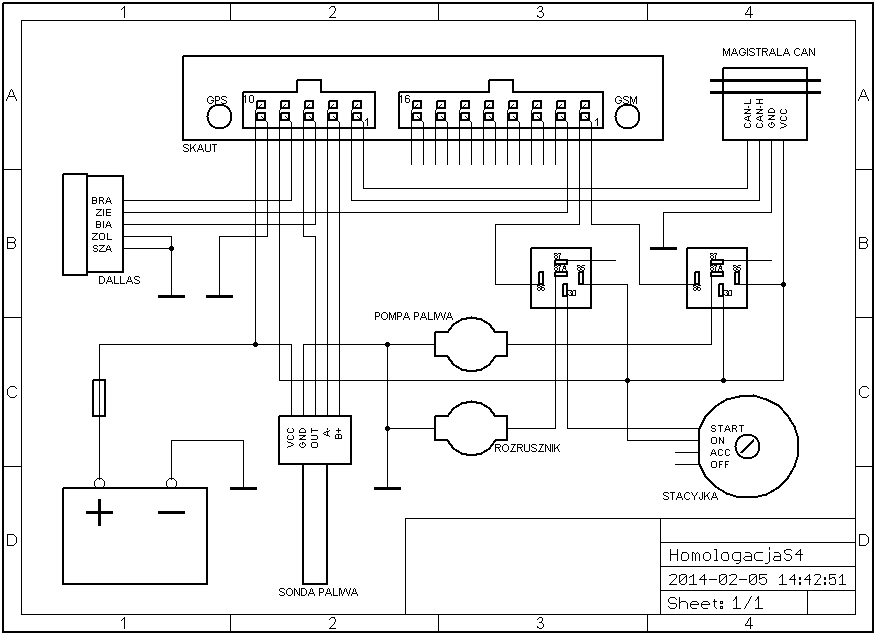
¶ Przebieg montażu
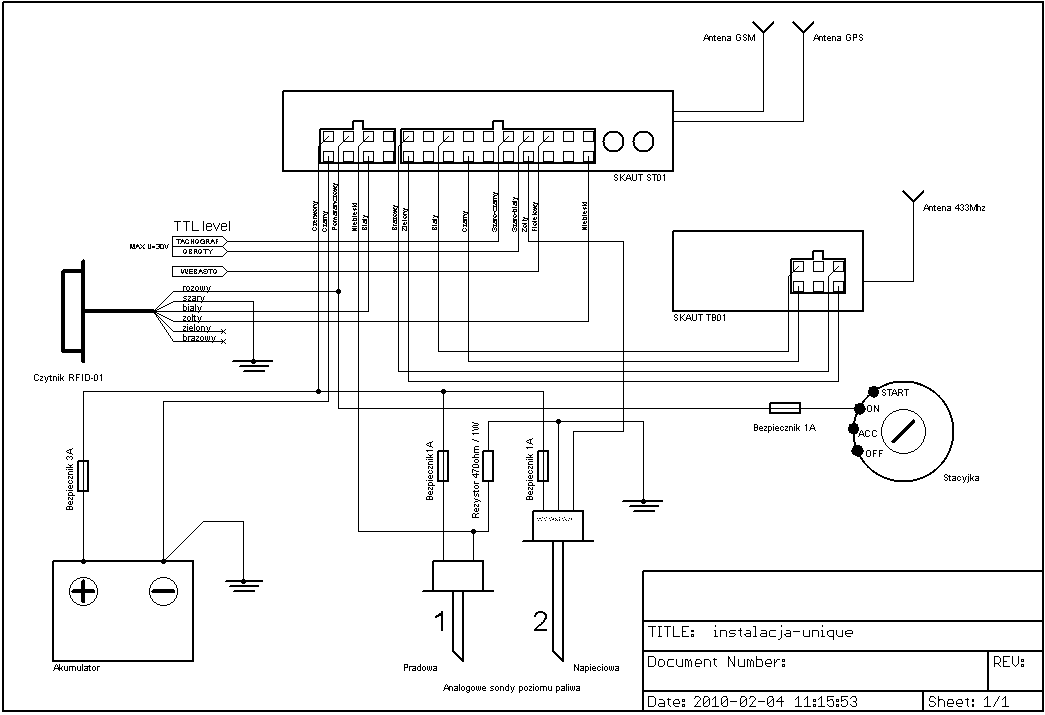
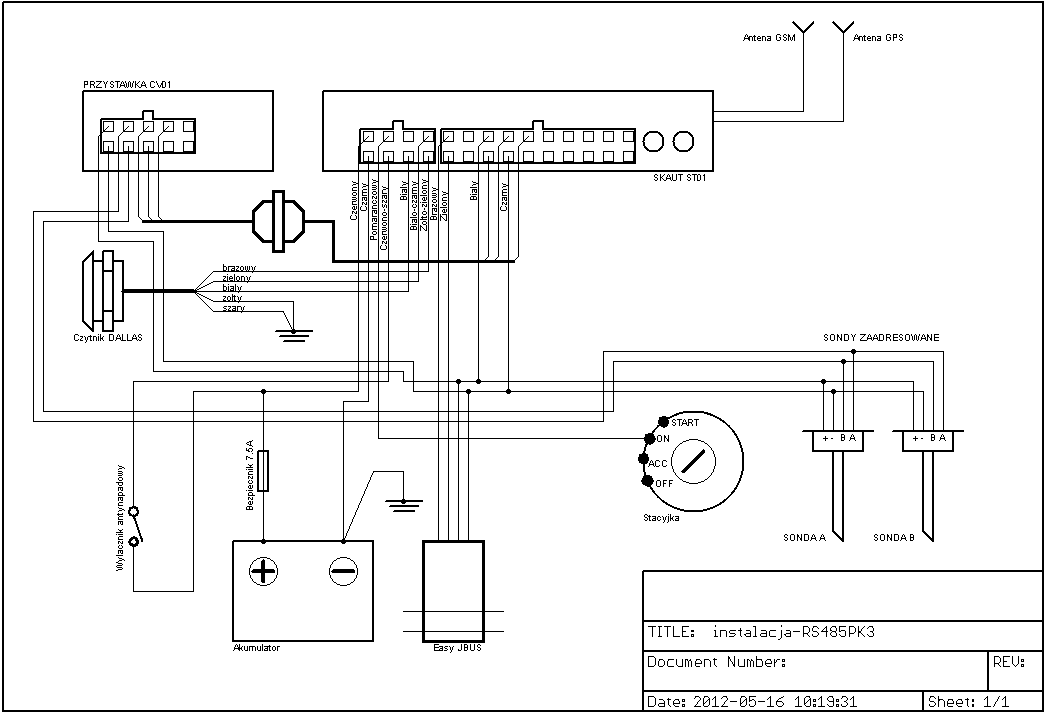
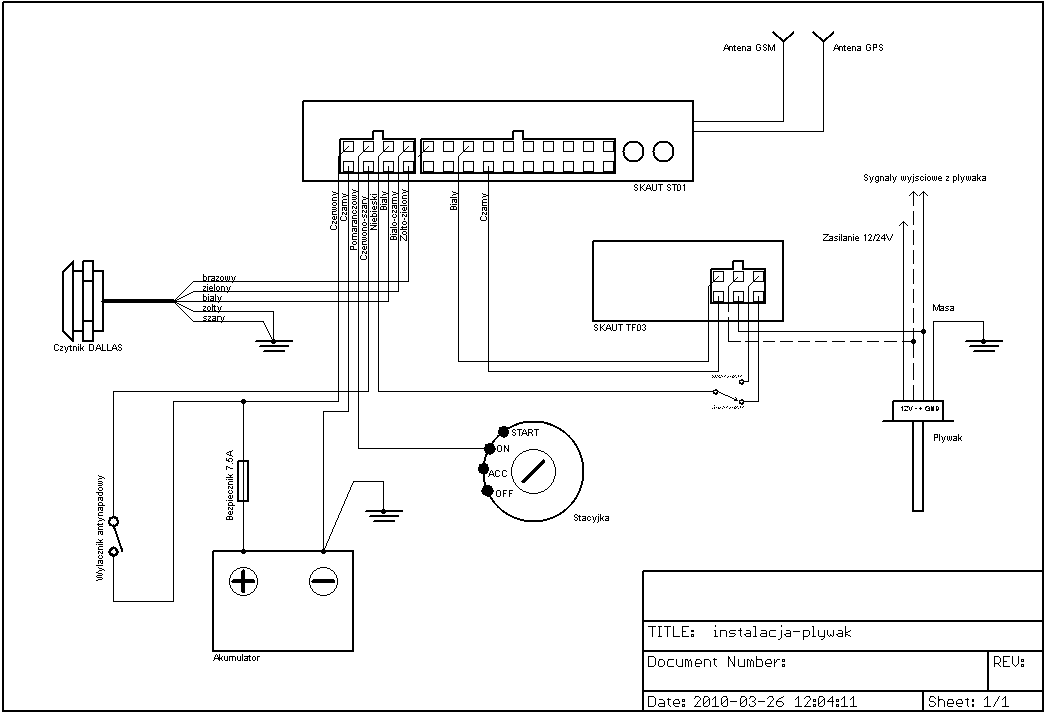
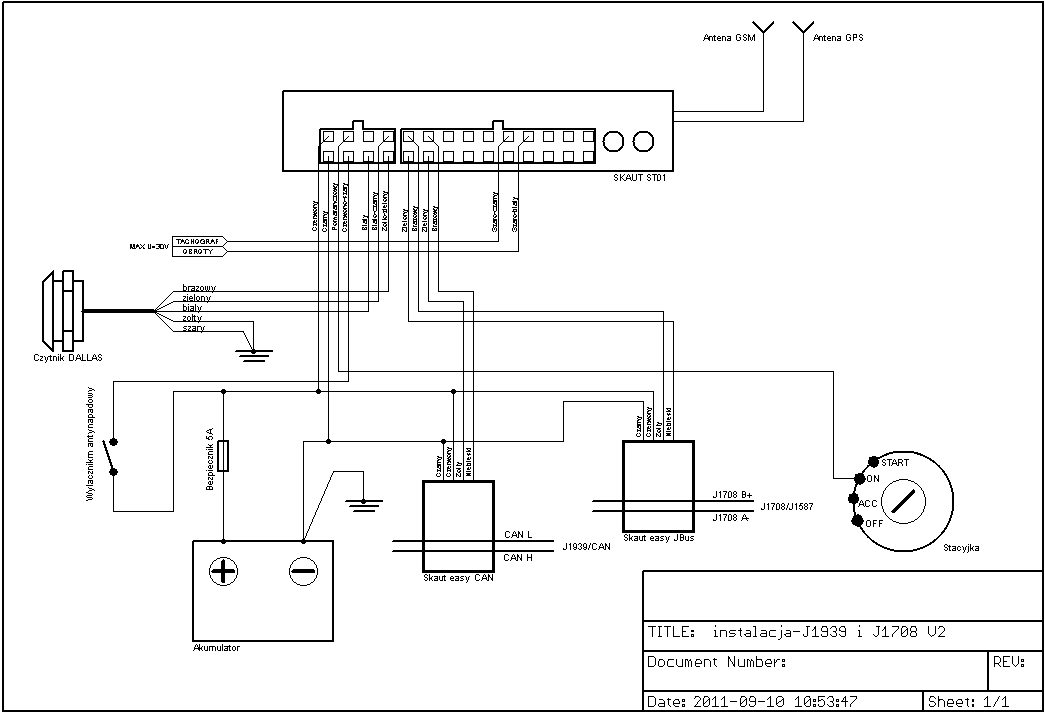
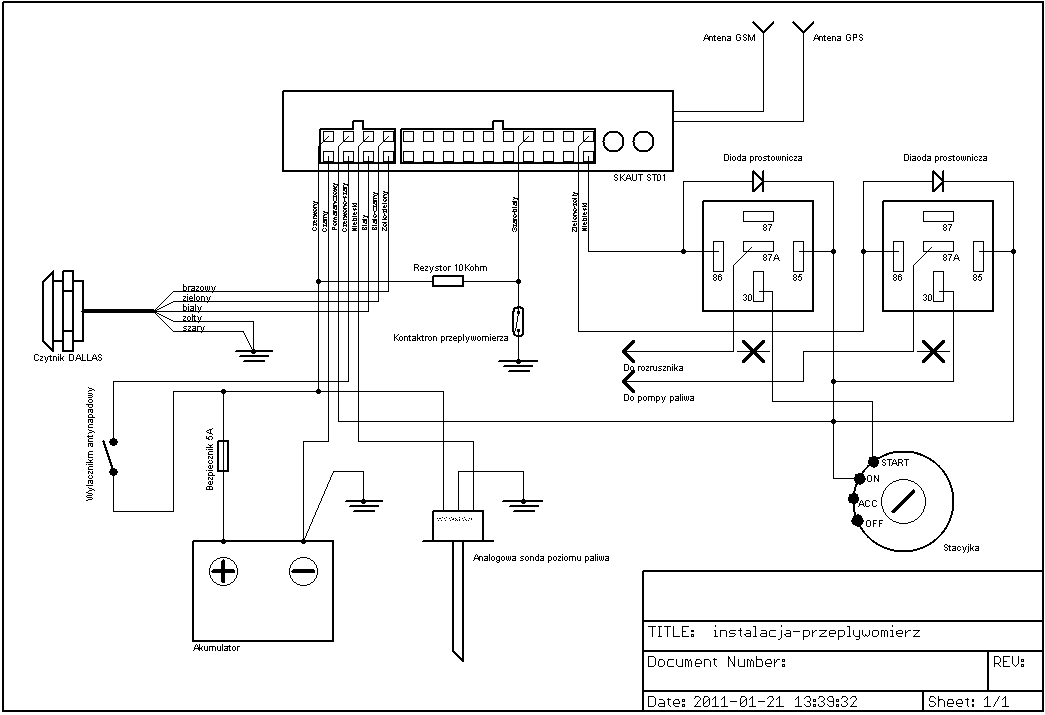
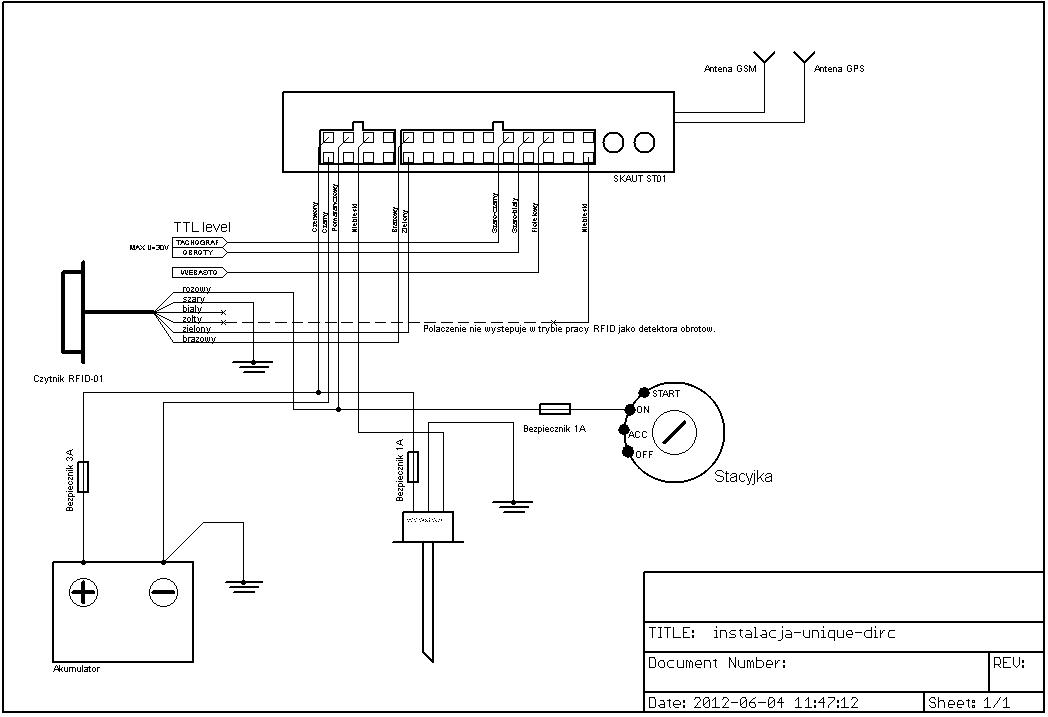
Schemat podłączenia immobilisera w pojeździe przedstawiają poniższe rysunki. W funkcji elementów uniemożliwiających uruchomienie silnika zastosowano przekaźniki samochodowe typu HFV4/0121Z1D1 wyposażone w wewnętrzne diody zabezpieczające podłączone równolegle do cewek. Podany poniżej schemat może zostać zmodyfikowany w zależności od potrzeb poprzez dołączenie dodatkowych sygnałów do niewykorzystanych wejść analogowych oraz cyfrowych.
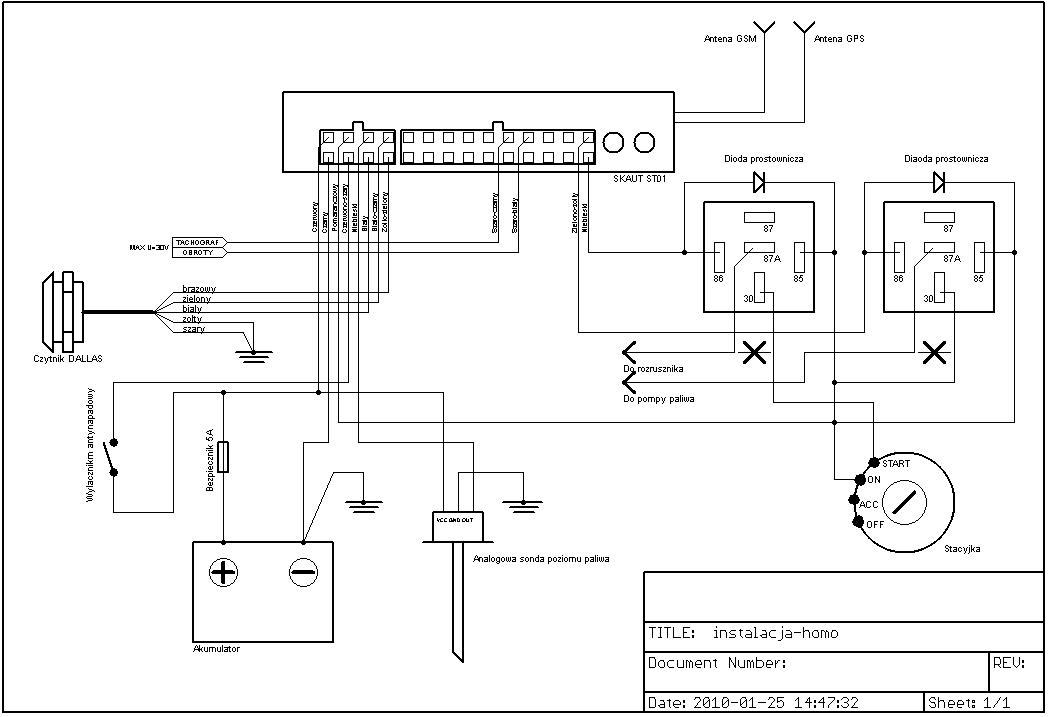
¶ Montaż anten
W pojeździe montowane są dwie anteny tj. antena GSM oraz GPS. Paskową antenę GSM montujemy na wewnętrzną stronę szyby, która nie posiada metalizowanych pasków do podgrzewania. Zabronione jest montowanie anteny na elementach metalowych. Antena GPS powinna być zamontowana poziomo tak, by nie było metalowych przeszkód w widoczności satelitów GPS.
¶ Zasilanie
SKAUT-2: Średni pobór prądu z instalacji pojazdu wynosi 50 mA.
SKAUT-3: Średni pobór prądu z instalacji pojazdu wynosi 85 mA. Pobór prądu może zostać zmniejszony do 40 mA w przypadku postoju pojazdu (wyłączona stacyjka) w trybie oszczędności energii.
SKAUT-4: Średni pobór prądu z instalacji pojazdu wynosi 50mA / 30mA (tryb oszczędności).
W związku ze zwiększonym poborem prądu z instalacji pojazdu, związanym z zainstalowaniem immobilisera, zaleca się zwiększenie pojemności akumulatora podstawowego pojazdu w stosunku do akumulatora montowanego standardowo.
¶ Konfiguracja
W celu zapewnienia poprawnej pracy immobilisera zainstalowanego zgodnie z przedstawionym schematem ideowym należy zwrócić uwagę, aby konfiguracja urządzenia zawierała poniższe dane.
| Nazwa parametru | Nazwa terminalowa | Wartość | Opis |
|---|---|---|---|
| Wejście cyfrowe DIN0 | DIN0CONF | 1061 | Stacyjka |
| Wejście cyfrowe DIN1 | DIN1CONF | 1 | Wyłącznik antynapadowy |
¶ Procedura sprawdzania pojazdu po zainstalowaniu immobilisera
¶ W zakresie funkcjonowania immobilisera
Sprawdzić działanie immobilisera zgodnie z procedurami załączania i wyłączania immobilisera opisanymi w niniejszej Instrukcji.
¶ W zakresie poprawności funkcjonowania instalacji pojazdu
Przetestować działanie obwodów i elementów pojazdu, które w czasie montażu mogły zostać przypadkowo naruszone bądź uszkodzone, zgodnie z instrukcjami serwisowymi dotyczącymi tych elementów bądź obwodów, dostarczonymi przez ich producentów.
Sprawdzić prawidłowość funkcjonowania obwodów bądź elementów pojazdu, w których działanie immobiliser ingeruje, zgodnie z odpowiednimi procedurami serwisowymi dotyczącymi tych elementów bądź obwodów, dostarczonymi przez ich producentów.
Zaleca się zwrócenie szczególnej uwagi na procedury związane z bezpieczeństwem użytkowania pojazdu i jego wyposażenia!
¶ Instrukcja użytkowania
¶ Informacja o zakresie blokady
Immobiliser uniemożliwia działanie pojazdu przy wykorzystaniu jego własnego napędu, poprzez zablokowanie dwóch niezależnych obwodów pojazdu niezbędnych do działania pojazdu przy wykorzystaniu jego własnego napędu (np. rozrusznik, zapłon, zasilanie paliwem itp.).
¶ Niezawodność i bezpieczeństwo działania
Immobiliser działa niezawodnie przy zapewnieniu w pojeździe poniższych warunków środowiskowych:
- warunki klimatyczne: temperatura otoczenia od do (immobiliser powinien być montowany w przedziale pasażerskim lub bagażowym)
- stopień szczelności obudowy: IP40 (immobiliser powinien być montowany w przedziale pasażerskim lub bagażowym lub dowolnym innym miejscu, w którym zastosowany stopień szczelności obudowy zapewni bezpieczeństwo pracy immobilisera)
¶ Włączanie immobilisera
Immobiliser włączany jest automatycznie, bez ingerencji kierowcy, po upływie 30 sekund od wyjęcia kluczyka ze stacyjki.
¶ Wyłączanie immobilisera
Immobiliser wyłączany jest poprzez przyłożenie klucza kodowego do czytnika. W roli klucza zastosowano pastylkę Dallas (281 474 976 710 656 kombinacji klucza – średni czas skanowania ok. 2 mln lat).
¶ Wskaźnik optyczny
W wersji ST01 zastosowano optyczny diodowy wskaźnik stanu immobilisera.
- Immobiliser włączony – kolor czerwony
- Immobiliser wyłączony – kolor zielony
- Odczyt klucza – kolor pomarańczowy.
Wersja Skaut-i ST01 nie posiada wskaźnika diodowego, może natomiast wysłać powiadomienie przy pomocy wiadomości SMS.
¶ Instrukcja konserwacji
Urządzenie nie wymaga konserwacji.
Zaleca się okresowe (nie rzadziej niż co 2 lata) wykonywanie przeglądu ogólnego stanu technicznego urządzenia i jego przyłączenia oraz funkcjonowania elementów wykonawczych.
W przypadku urządzeń wyposażonych w dodatkową wewnętrzną baterię, podtrzymującą zasilanie w przypadku awarii akumulatora pojazdu, zaleca się jej wymianę co 2 lata.
¶ Informacje dla nabywcy
- Immobiliser powinien być montowany zgodnie z Instrukcją montażu dostarczoną przez producenta urządzenia.
- W celu zapewnienia prawidłowej instalacji immobilisera zaleca się korzystanie z usług dobrego instalatora.
- Certyfikat montażu dostarczony wraz z immobiliserem powinien być wypełniony i podpisany przez instalatora.
- Wszelkie dokonywanie zmian lub uzupełnień do immobilisera może spowodować jego nieprawidłowe działanie, narażając na niebezpieczeństwo jego użytkowników i skutkuje automatycznym unieważnieniem Certyfikatu instalacji.
Tego sprzętu nie należy umieszczać razem z innymi odpadami.

¶ Parametry techniczne
¶ Skaut - 4
| Parametr | Wartość |
|---|---|
| Parametry transmisyjne | GSM/GPRS 850/900/1800/1900Mhz GPRS multi-slot class 10 GPRS mobile station class B |
| System pozycjonowania | 56-kanałowy odbiornik GNSS (Global Navigation Satellite Systems) GPS (USA) QZSS (Japonia) GLONASS (Rosja) Galileo (Europa) |
| Systemy poprawek różnicowych | SBAS (Satellite Based Augumentation Systems) WAAS (USA) EGNOS (Europa) MSAS (Japonia) |
| Akwizycja danych GPS / GLONASS | zimny start: 29s / 30sreakwizycja: 1s / 3s |
| Czułość odbiornika GPS / GLONASS | śledzenie -162 dBm / -158 dBmzimny start -148 dBm / -140 dBmgorący start -148 dBm / -145 dBm |
| Dokładność określenia pozycji GPS / GLONASS | 2,5m CEP / 4,0m |
| Dokładność określenia pozycji GPS / GLONASS SBAS |
2,0m CEP / n.a. |
| Sposób pozyskania danych | co zdefiniowany czas (2s - 99999s)co zdefiniowaną drogę ( 1m - 99999m)co zmianę kierunku ruchu o zdefiniowany kąt ( - ) |
| Pojemność pamięci danych | 31232 pomiary |
| Znamionowe napięcie zasilania | 12V DC lub 24V DC |
| Dopuszczalne napięcie zasilania | 10,5V DC - 30V DC |
| Pobór prądu w trakcie czuwania | 50mA Vcc=12V lub 30mA Vcc=24V |
| Pobór prądu w trybie oszczędności energii | 30mA Vcc = 12V lub 20mA Vcc = 24V |
| Pobór prądu w trakcie uśpienia | 0,4mA Vcc = 12V lub 0,5mA Vcc = 24V |
| Pobór prądu w trakcie transferu danych | impulsowo do 250 mA |
| Liczba wejść cyfrowych | 8 |
| Poziomy napięć dla wejść cyfrowych | 0 logiczne <2,5V1 logiczne >3,5V |
| Poziom dla wejścia WAKE-UP | >10,5V |
| Częstotliwość próbkowania wejść cyfrowych | 10Hz |
| Konfigurowalność parametrów poszczególnych wejść | Tak |
| Stała czasowa programowej filtracji stanu wejścia | 1s |
| Liczba wejść analogowych | 2 |
| Rozdzielczość przetwornika A/C | 12 bitów |
| Rezystancja wejściowa wejść analogowych | 80 kΩ |
| Liczba wejść zliczających | 2 |
| Pojemność licznika dla wejść zliczających | 2 147 483 648 impulsów |
| Liczba wejść częstotliwościowych | 2 |
| Rozdzielczość pomiaru częstotliwości | 0,1Hz |
| Maksymalna częstotliwość sygnału dla wejść częstotliwościowych | 20 kHz, przy amplitudzie sygnału 5V i współczynniku wypełnienia 50% |
| Liczba wyjść dwustanowych | 4 |
| Typ wyjść dwustanowych | OC (sterowanie typu otwarty kolektor) |
| Obciążalność wyjść dwustanowych | <0,25A |
| Interfejsy komunikacyjne | RS232C, J1708/RS485, 1-WIRE, CAN, USB |
| Obciążalność portu USB | 120 mA |
| Wbudowane sterowniki USB | HID (klawiatura), CDC (USB to RS232), MS (FAT 12/16/32), HCI Bluetooth, obsługa HUB |
| Podtrzymanie pracy urządzenia po zaniku napięcia zasilającego | opcjonalne, akumulator wewnętrzny lub zewnętrzny |
| Rodzaj akumulatora podtrzymującego | NiMh 8,4V |
| Stopień szczelności obudowy | IP 40 |
| Temperatura pracy | do |
| Temperatura przechowywania | do |
| Wymiary | 125mm x 80mm x 31mm |
¶ Skaut - 3
| Parametr | Wartość |
|---|---|
| Parametry transmisyjne | GSM/GPRS 850/900/1800/1900Mhz GPRS multi-slot class 10 GPRS mobile station class B |
| System pozycjonowania | GPS/SBAS (WAAS, EGNOS, MSAS) |
| Czułość odbiornika GPS | śledzenie -162 dBmgorący start -156 dBmzimny start -147 dBm |
| Dokładność określenia pozycji GPS | 2,5 m CEP |
| Sposób pozyskania danych | co zdefiniowany czas (2s - 99999s)co zdefiniowaną drogę ( 1m - 99999m)co zmianę kierunku ruchu o zdefiniowany kąt ( - ) |
| Pojemność pamięci danych | 31232 pomiary |
| Znamionowe napięcie zasilania | 12V lub 24V |
| Dopuszczalne napięcie zasilania | 10V - 30V |
| Napięcie zasilania dodatkowych urządzeń zewn. (złącze X2-18) | Równe napięciu zasilania modułu głównego |
| Zabezpieczenie wyjścia zasilającego urządzenia zewn. (złącze X2-18) | Bezpiecznik polimerowy 0,75 A |
| Pobór prądu w trakcie czuwania | 85mA / 40mA (w trybie oszczędności) Vcc = 12V55mA / 30mA (w trybie oszczędności) Vcc = 24V |
| Pobór prądu w trakcie transferu danych | impulsowo do 250 mA |
| Liczba wejść cyfrowych | 8 |
| Poziomy napięć dla wejść cyfrowych | 0 logiczne <1V1 logiczne >3V |
| Częstotliwość próbkowania wejść cyfrowych | 10Hz |
| Konfigurowalność parametrów poszczególnych wejść | Tak |
| Stała czasowa programowej filtracji stanu wejścia | 1s |
| Liczba wejść analogowych | 2/0 |
| Rozdzielczość przetwornika A/C | 12 bitów |
| Rezystancja wejściowa wejść analogowych | 80 kΩ |
| Liczba wejść zliczających | 2 |
| Pojemność licznika dla wejść zliczających | 2 147 483 648 impulsów |
| Liczba wejść częstotliwościowych | 2 |
| Rozdzielczość pomiaru częstotliwości | 0,1Hz |
| Maksymalna częstotliwość sygnału dla wejść częstotliwościowych | 20 kHz, przy amplitudzie sygnału 5V i współczynniku wypełnienia 50% |
| Liczba wyjść dwustanowych | 4 |
| Typ wyjść dwustanowych | OC (sterowanie typu otwarty kolektor) |
| Obciążalność wyjść dwustanowych | <0,5A |
| Interfejsy komunikacyjne | RS232C, J1708, 1-WIRE, CAN, USB |
| Obciążalność portu USB | 500 mA |
| Wbudowane sterowniki USB | HID (klawiatura), CDC (USB to RS232), MS (FAT 12/16/32), HCI Bluetooth, obsługa HUB |
| Podtrzymanie pracy urządzenia po zaniku napięcia zasilającego | opcjonalne, akumulator wewnętrzny lub zewnętrzny/akumulator wewnętrzny |
| Rodzaj akumulatora podtrzymującego | NiMh 6x1,2V lub 7x1,2V |
| Stopień szczelności obudowy | IP 40 |
| Temperatura pracy | do |
| Temperatura przechowywania | do |
| Wymiary | 145mm x 104mm x 31mm |
¶ Skaut 1-2
| Parametr | Wartość |
|---|---|
| Parametry transmisyjne (Skaut, Skaut-i) | GSM/GPRS 900/1800/1900Mhz GPRS multi-slot class 10/8 GPRS mobile station class B |
| Parametry transmisyjne (Skaut-2) | GSM/GPRS 850/900/1800/1900Mhz GPRS multi-slot class 10 GPRS mobile station class B |
| System pozycjonowania (Skaut, Skaut-i) | GPS/Galileo |
| System pozycjonowania (Skaut-2) | GPS/SBAS (WAAS, EGNOS, MSAS) |
| Czułość odbiornika GPS (Skaut, Skaut-i) | śledzenie -160 dBpozyskanie danych -160 dBzimny start -144 dB |
| Czułość odbiornika GPS (Skaut-2) | śledzenie -162 dBmgorący start -156 dBmzimny start -147 dBm |
| Dokładność określenia pozycji GPS | 2,5m CEP |
| Sposób pozyskania danych | co zdefiniowany czas (2s - 99999s)co zdefiniowaną drogę ( 1m - 99999m)co zmianę kierunku ruchu o zdefiniowany kąt ( - ) |
| Pojemność pamięci danych | 15392 pomiary |
| Znamionowe napięcie zasilania | 12V lub 24V |
| Dopuszczalne napięcie zasilania | 10V-30V |
| Napięcie zasilania dodatkowych urządzeń zewn. (złącze X2-18) | Równe napięciu zasilania modułu głównego |
| Zabezpieczenie wyjścia zasilającego urządzenia zewn. (złącze X2-18) | Bezpiecznik polimerowy 0,75A |
| Pobór prądu w trakcie czuwania | 50mA |
| Pobór prądu w trakcie transferu danych | impulsowo do 250mA |
| Liczba wejść cyfrowych (Skaut/Skaut-i) | 8/2 |
| Poziomy napięć dla wejść cyfrowych | 0 logiczne <1V1 logiczne >3V |
| Częstotliwość próbkowania wejść cyfrowych | 10Hz |
| Konfigurowalność parametrów poszczególnych wejść | Tak |
| Stała czasowa programowej filtracji stanu wejścia | 1s |
| Liczba wejść analogowych (Skaut/Skaut-i) | 2/0 |
| Liczba zakresów pomiarowych dla wejść analogowych | 2 (0-10V oraz 0-30V) |
| Sposób zmiany zakresu pomiarowego | Automatyczny |
| Rozdzielczość przetwornika A/C | 10 bitów |
| Rezystancja wejściowa wejść analogowych | 80 kΩ |
| Liczba wejść zliczających (Skaut/Skaut-i) | 2/0 |
| Pojemność licznika dla wejść zliczających | 2 147 483 648 impulsów |
| Liczba wejść częstotliwościowych | 2 |
| Rozdzielczość pomiaru częstotliwości | 0,1Hz |
| Maksymalna częstotliwość sygnału dla wejść częstotliwościowych | 20 kHz, przy amplitudzie sygnału 5V i współczynniku wypełnienia 50% |
| Liczba wyjść dwustanowych (Skaut/Skaut-i) | 4/2 |
| Typ wyjść dwustanowych | OC (sterowanie typu otwarty kolektor) |
| Obciążalność wyjść dwustanowych | <0,5A |
| Interfejsy komunikacyjne (Skaut/Skaut-i) | RS232C, RS485, 1-WIRE/RS232C, 1-WIRE |
| Interfejsy komunikacyjne (Skaut-2) | RS232C, RS485, 1-WIRE, CAN |
| Podtrzymanie pracy urządzenia po zaniku napięcia zasilającego (Skaut/Skaut-i) | opcjonalne, akumulator wewnętrzny lub zewnętrzny/akumulator wewnętrzny |
| Rodzaj akumulatora podtrzymującego | Żelowy 6V lub NiMh 6x1,2V lub 7x1,2V |
| Stopień szczelności obudowy | IP 40 |
| Temperatura pracy | do |
| Temperatura przechowywania | do |
| Wymiary | 146mm x 105mm x 35mm |
¶ Schematy instalacyjne
¶ Podłączenie czytnika RFID, Terminala TE01, sondy paliwa napięciowej i prądowej
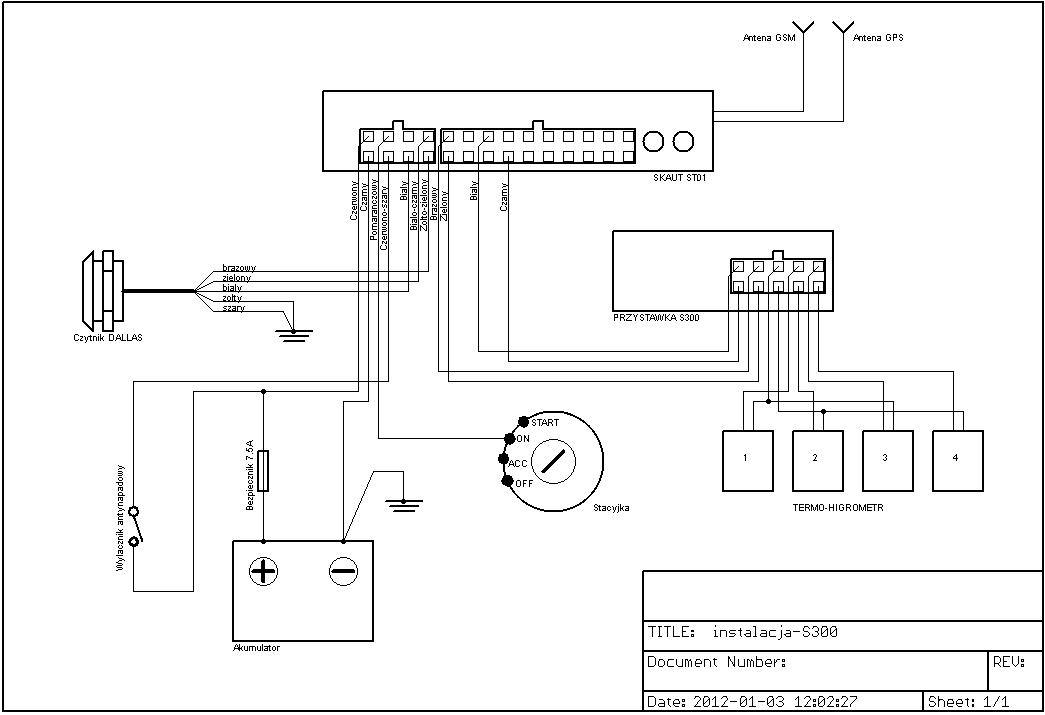
¶ Podłączenie termohigrometrów S300
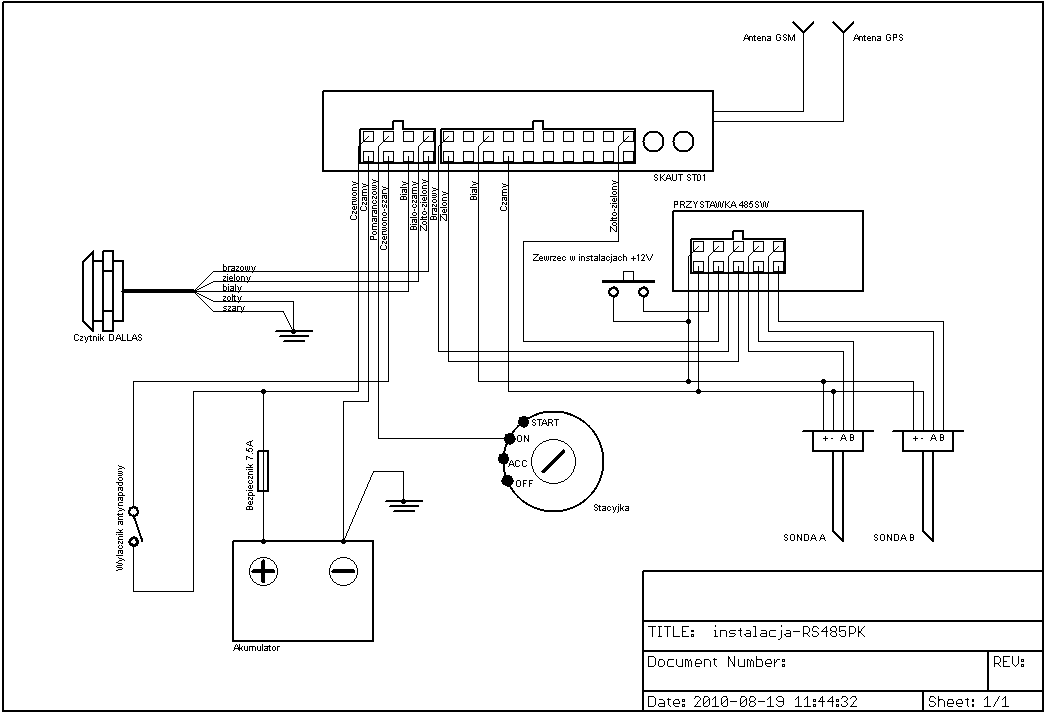
¶ Podłączenie przystawki RS485SW
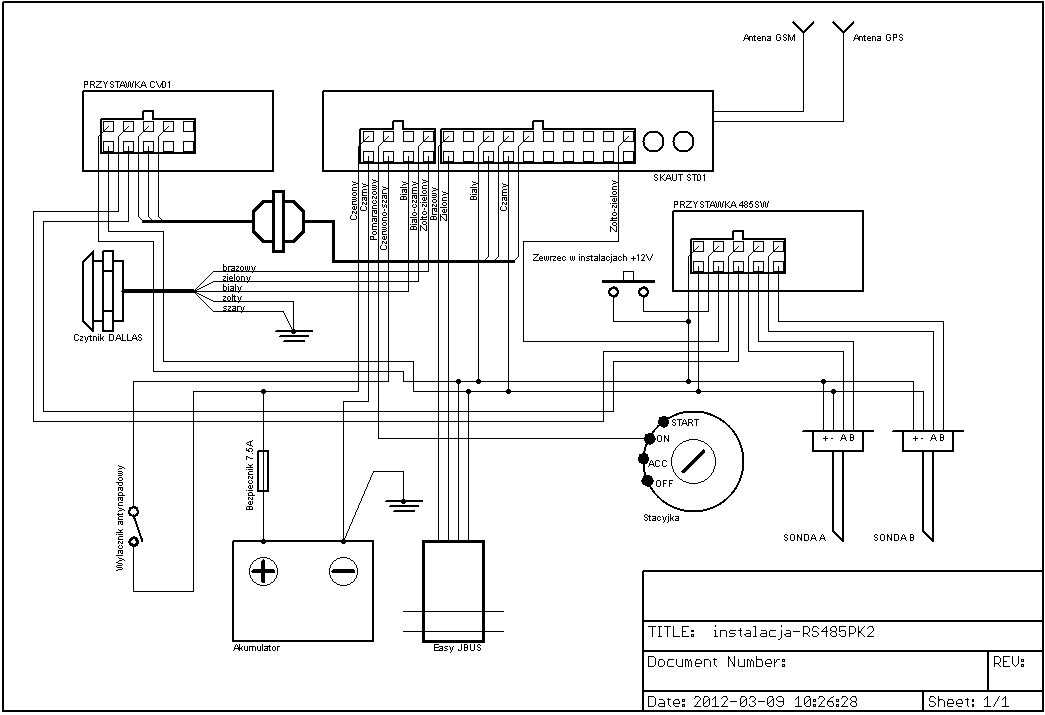
¶ Podłączenie przystawki CV01 i RS485SW
¶ Podłączenie przystawki CV01
¶ Odczyt paliwa z pływaka z wykorzystaniem przystawki TF03
¶ Podłączenie do magistral CAN i JBUS:
¶ Podłączenie impulsowego przepływomierza paliwa
¶ Podłączenie czytnika RFID poprzez magistralę JBUS/RS485 w dwóch trybach pracy
- Czytnik kart zbliżeniowych
- Detektor kierunku obrotów i prędkości obrotowej ( do )
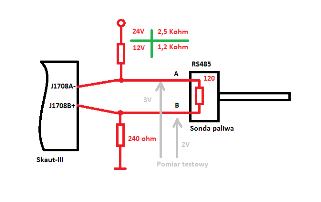
¶ Podłączenie sondy paliwa (np. perpetuum) z portem RS485 (z terminatorem 120ohm) do portu J1708
W przypadku sond paliwa z portem RS485, który nie jest zakończony rezystorem 120 Ohm (np. aplisens), dodatkowe zewnętrzne rezystory nie są wymagane.
Rejestrator Skaut 4 posiada uniwersalny port J1708/RS485 i zewnętrzne rezystory nie są wymagane.
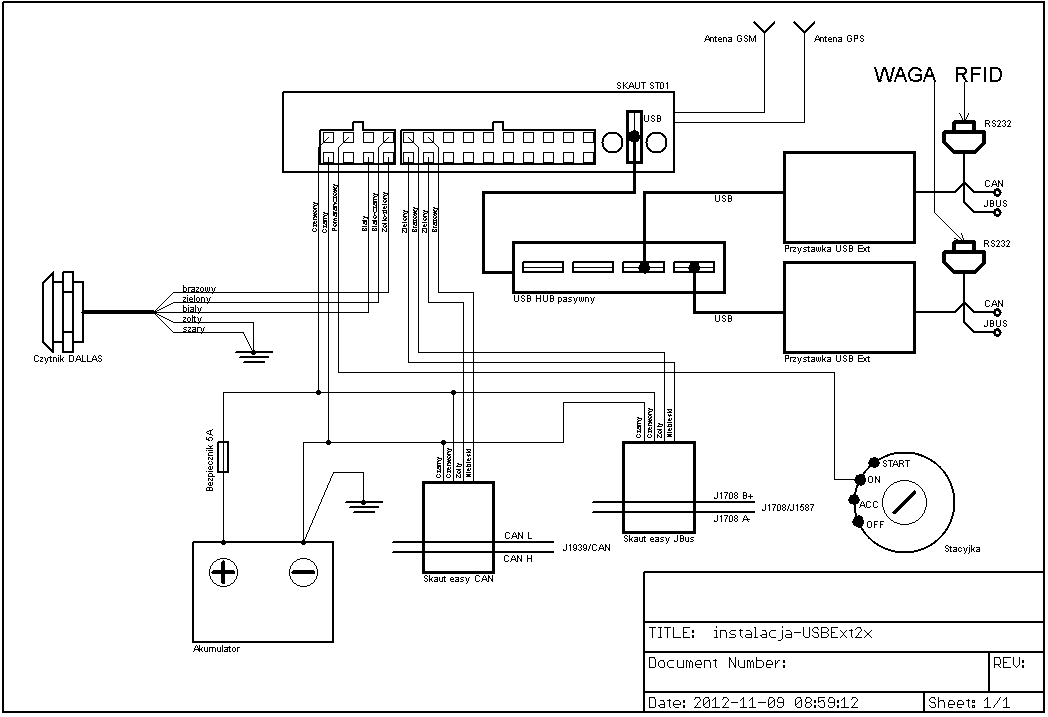
¶ Podłączenie przystawek USB
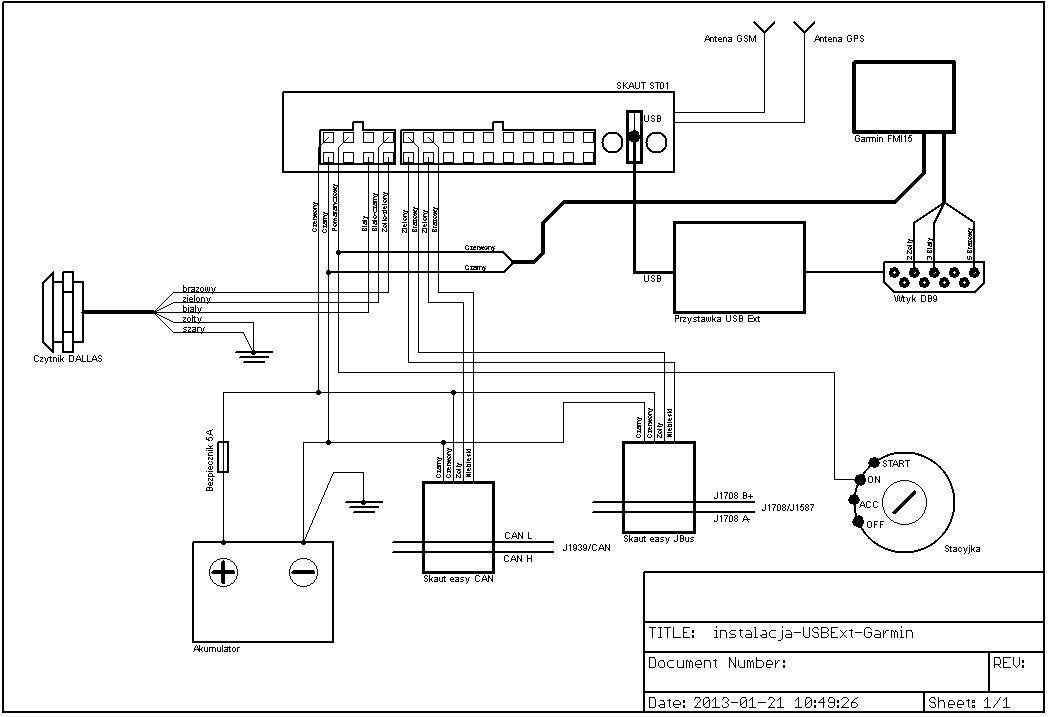
¶ Podłączenie nawigacji Garmin
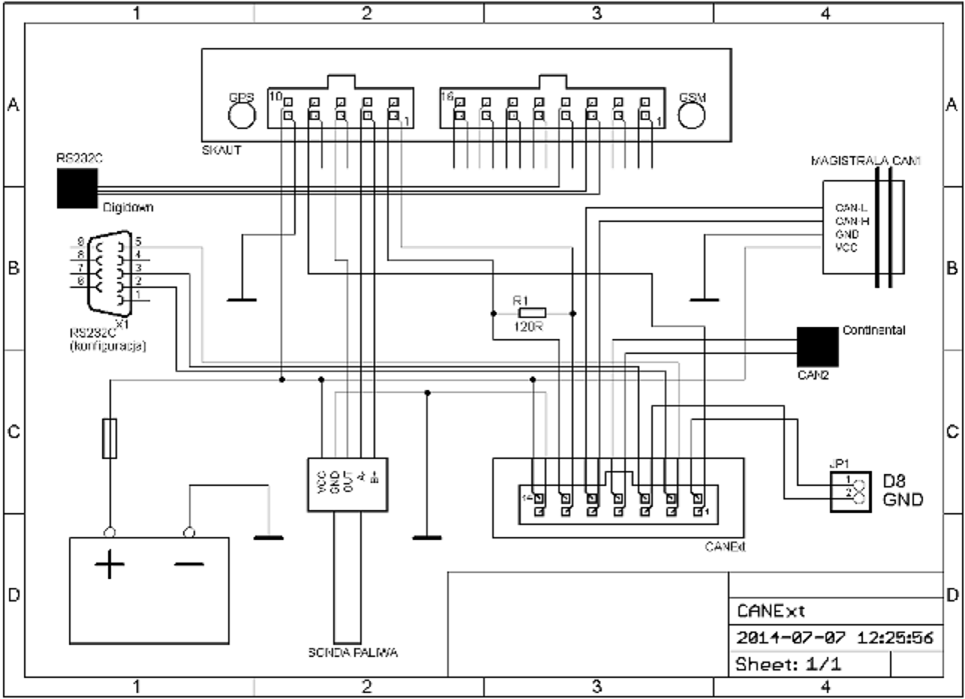
¶ Podłączenie przystawki CanExt z systemem Continental i Digidown