¶ Wstęp
Jedną z czynności instalatorskich jest odpowiednie skonfigurowanie urządzenia Skaut w ten sposób, aby działał w oczekiwany sposób i prawidłowo przesyłał wszystkie potrzebne dane.
Urządzenie konfigurujemy przy pomocy aplikacji SkautManager4. Istnieje też możliwość aby dokonać zmian w konfiguracji przy pomocy wiadomości tekstowych SMS.
¶ Instalacja programu
Program Skaut Manager 4 dostępny jest w dwóch wersjach, różniących się wyłącznie sposobem instalacji na komputerze użytkownika. Sam program w obu przypadkach wygląda i działa identycznie. Wybór właściwej wersji zależy wyłącznie od indywidualnych predyspozycji użytkownika.
-
Wersja z instalatorem (polecana).
Wersja ta kierowana jest dla typowego użytkownika i wykonuje za niego wszystkie czynności instalacyjne. Zainstalowanie programu ogranicza się do uruchomienia plikuSkautSetup4.exei akceptowaniu kolejnych czynności wyświetlanych na ekranie. Po pomyślnym zakończeniu instalacji należy go uruchamiać wybierając:Start > Programy > Skaut4 Tools > SkautManager4. -
Wersja skompresowana w formacie ZIP.
Wersja ta skierowana jest do tych użytkowników, którzy z różnych powodów preferują ręczną konfigurację swojego systemu.
W przypadku wybrania tej wersji instalacji należy pamiętać, że program nie jest dostępny z menu Start i dlatego należy go uruchamiać ręcznie wybierając plik SkautManager4.exe z katalogu, do którego archiwum zostało rozpakowane lub ręcznie dodać skrót do tego pliku do menu Start.
¶ Podłączenie urządzenia
Prawidłowa praca z aplikacją Skaut Manager wymaga przyłączenia urządzenia Skaut do komputera. W zależności od wersji rejestratora połączenie odbywa się przez USB lub port szeregowy (RS232).
¶ Skaut 4,5N,6
Urządzenie należy podłączyć do standardowego portu szeregowego komputera wg poniższego schematu.
| Nr pinu w złączu Skaut | Nr pinu w złączu DB9 dla RS232C | Opis sygnału |
|---|---|---|
| 5 | 5 | GND |
| 6 | 2 | TXD |
| 8 | 3 | RXD |
Jeżeli komputer nie jest wyposażony w port szeregowy, należy zastosować konwerter USB na RS232, szeroko dostępny w sklepach komputerowych. Po zainstalowaniu i skonfigurowaniu konwertera jest on w systemie rozpoznawany jako kolejny wolny port szeregowy i jego podłączenie do urządzenia przebiega identycznie do opisanego wcześniej w tym rozdziale.
¶ Skaut 5, 7, 8
Rejestrator Skaut5 lub Skaut7/8 podłączamy do komputera bezpośrednio do portu USB.
¶ Pojęcia wykorzystywane w urządzeniach
¶ Czasy wysyłania danych
Wysyłanie danych na serwer odbywa się wg ustalonych reguł, pozwalających na ścisłą kontrolę kosztów transmisji. Głównymi parametrami odpowiedzialnymi za czasy wysyłania są:
- MinTime - jego znaczenie to "wyślij ramkę nie częściej niż", to zachowanie może być zmienione niektórymi opcjami
- MaxTime - jego znaczenie to "wyślij ramkę nie rzadziej niż"
- MaxDistance - dystans w metrach, po przejechaniu którego zostanie wysłana ramka; dodatkowo musi być spełniony MinTime
- MaxAngle - kąt obrotu w stopniach, po zmianie którego zostanie wysłana ramka; dodatkowo musi być spełniony MinTime
Inne parametry:
- MaxSpeed - wysyła ramkę jeśli prędkość GPS zostanie przekroczona "w górę" powyżej tej wartości
- MinSpeed - wysyła ramkę jeśli prędkość GPS zostanie przekroczona "w dół" poniżej tej wartości
Jeśli wystąpi jakieś zdarzenie powodujące wysłanie ramki, ale nie został spełniony warunek MinTime, ramka zostanie wysłana dopiero po upłynięciu MinTime.
W parametrze Options jest dużo ustawień powodujących wysłanie ramki w określonych sytuacjach innych niż opisane wyżej czasy (zmiana wejść cyfrowych itp.), ale w każdym z tych przypadków zawsze musi być spełniony dodatkowo warunek MinTime.
Każdy z czterech parametrów: MinTime, MaxTime, MaxDistance, MaxAngle przyjmuje dwie wartości: A i B. Domyślnie pierwszy stosowany jest dla włączonej stacyjki, drugi dla wyłączonej. W typowych sytuacjach pierwsza wartość jest mniejsza od drugiej (przy włączonej stacyjce chcemy wysyłać dane częściej). Można to jednak zmienić tak, aby wartości A i B były uzależnione nie od stacyjki, ale od tego do jakiej sieci rejestrator jest zalogowany. To z kolej umożliwia kontrolę kosztów w różnych krajach lub u różnych operatorów (zobacz: Wysyłanie danych w zależności od kraju i operatora).
¶ "Oszczędzanie" czasu MinTime
MinTime może zostać warunkowo skrócony opcją 10. Po jej włączeniu rejestrator zlicza czas, który udało mu się "zaoszczędzić" w stosunku do czasu określonego w MinTime i o ten czas może być skrócony kolejny MinTime.
Przykład: MinTime jest ustawiony na 1 min., ale inne warunki wysłania spowodowały, że w rzeczywistości ramka została wysłana po 3 minutach. Powstały więc 2 minuty "zapasu", które mogą być odebrane w przyszłości. Czas ten kumuluje się przy kolejnych ramkach.
¶ Wysyłanie danych w zależności od kraju i operatora
Istnieją opcje, które pozwalają uzależnić czas wysyłania od kodu operatora znajdującego się na "białej liście" (zobacz: Biała i czarna lista operatorów i krajów). Są to opcje 5 i 55. Tabela zawiera możliwe sytuacje. W skrócie: opcja 5 wszystkich operatoró z "białej listy" traktuje jednakowo, opcja 55 inaczej traktuje pierwszego operatora z listy. Można założyć, że ten pierwszy operator oznacza "sieć własną" lub "sieć preferowaną", czyli taką, w której można pozwolić sobie na częstsze wysyłanie danych.
Ustawienia opcji 5 i 55 określają, czy pod uwagę brać wartość A czy B podaną w parametrach: MinTime=A,B, MaxTime=A,B, MaxDistance=A,B i MaxAngle=A,B.
| Opcja 5 | Opcja 55 | Opis |
|---|---|---|
| 0 | 0 | Czasy wysyłania zawsze wg stacyjki: A - dla włączonej, B - dla wyłączonej |
| 0 | 1 | Stosuj czas: A - jeśli jednocześnie włączona stacyjka i pierwsza sieć z "białej listy", B - wyłączona stacyjka lub inna sieć z listy. Albo inaczej: dla sieci wymienionej jako pierwsza na liście stosuje czasy wg stacyjki, dla pozostałych stosuje czas B |
| 1 | 0 | Stosuj czas: A - dla dowolnej sieci z "białej listy", B - dla sieci spoza listy |
| 1 | 1 | Stosuj czas: A - dla pierwszej sieci z "białej listy", B - dla pozostałych sieci z listy |
¶ Biała i czarna lista operatorów i krajów
W konfiguratorze dostępne są następujące parametry:
- NetworkCodes - "biała lista" operatorów dozwolonych (domyślna wartość to
NetworkCodes=0, oznaczająca "wszystkie sieci") - BlackNetwork - "czarna lista" operatorów niedozwolonych
Każda z tych list może zawierać wiele kodów GSM operatorów (np. '26003' - Polska, Orange). Można też podawać samą część określającą kraj (np. 260 – Polska).
Jeśli kraj lub operator znajdą się na "czarnej liście", rejestrator nie będzie się łączył do GPRS w takiej sieci. "Czarna lista" ma pierwszeństwo przed "białą listą", więc jeśli operator znajdzie się na obu, to zostanie zablokowany.
"Biała lista" może również wpływać na czasy wysyłania danych u różnych operatorów. Zobacz: Wysyłanie danych w zależności od kraju i operatora.
¶ Wejścia wirtualne
Są to stany wewnętrzne urządzenia, które mogą się zmieniać w zależności od trybu pracy i kombinacji różnych parametrów. Nie da się ich wprost zmieniać, ale dzięki ich obserwacji można dowiedzieć się różnych rzeczy na temat aktualnego stanu pracy urządzenia. Na serwer te wartości wysyłane są jako wartości bitowe w polu o identyfikatorze 15 wg FrameConfig. W rejestratorze i dokumentacji wejścia wirtualne opisywane są jako VIRTn.
Kolejne bity oznaczają:
| Bit | Znaczenie |
|---|---|
| 0 | Stacyjka wirtualna (patrz parametr Ignition) |
| 1 | OverSpeed (patrz opcja 8) |
| 2 | OverTemp (patrz opcja 78) |
| 3 | ChangeEvent1-4 (patrz parametry ChangeEvent) |
| 4 | |
| 5 | |
| 6 | |
| 7 | jazda prywatna (patrz opcja 100) |
| 8 | autoryzacja (patrz autoryzacja). Dostępne od wersji firmware 10.xxx.464 |
¶ Autoryzacja i brak autoryzacji
Autoryzacja służy do poprawnej identyfikacji użytkownika. Użytkownik jest zautoryzowany jeśli:
- do czytnika kart przyłożono kartę identyfikacyjną znajdującą się na liście dopuszczonych
Jeśli wcześniej była autoryzacja, to zostanie skasowana jeśli:
- w przypadku pastylek magnetycznych (patrz opcja 52) po 1 minucie od zabrania pastylki
- przy aktywnej funkcji immobilizera (patrz opcja 18) po 10 sekundach od wyłączenia stacyjki określonej parametrem Immobiliser
- jeśli brak funkcji immobilizera i brak opcji pastylki magnetycznej po wyłączeniu wirtualnej stacyjki (zdefiniowanej parametrem Ignition)
- w sytuacji opisanej w opcji 146.
Stan autoryzacji nie jest wprost wysyłany na serwer (UPDATE: patrz opcja 183). Nie należy zakładać, że jeśli wysłano nr karty przyłożonej do czytnika, to nastąpiła poprawna autoryzacja. Nr karty jest wysyłany za każdym razem gdy zostanie odczytana i to nawet w sytuacji, gdy nie nastąpiła poprawna autoryzacja (np. karty nie ma na liście dopuszczonych).
¶ Jazda prywatna
Jest to tryb urządzenia, kiedy nie są wysyłane dane lokalizacyjne (również pole fixstat jest zerem). Tryb prywatny może być włączony fizycznym przełącznikiem podłączanym z zewnątrz do wejścia DIN1 lub w przypadku braku autoryzacji. Tryb jazdy prywatnej może być sygnalizowany na wyjściu. Taka informacja jest też wysyłana w wejściu wirtualnym VIRT7. Do sterowania jazdą prywatną służą opcje: 100, 101, 102 i 103.
Jeśli chcemy uzyskać trwały efekt braku danych lokalizacyjnych, można również użyć opcji 137, jednak nie aktywuje on jazdy prywatnej.
¶ Parametry konfiguracyjne
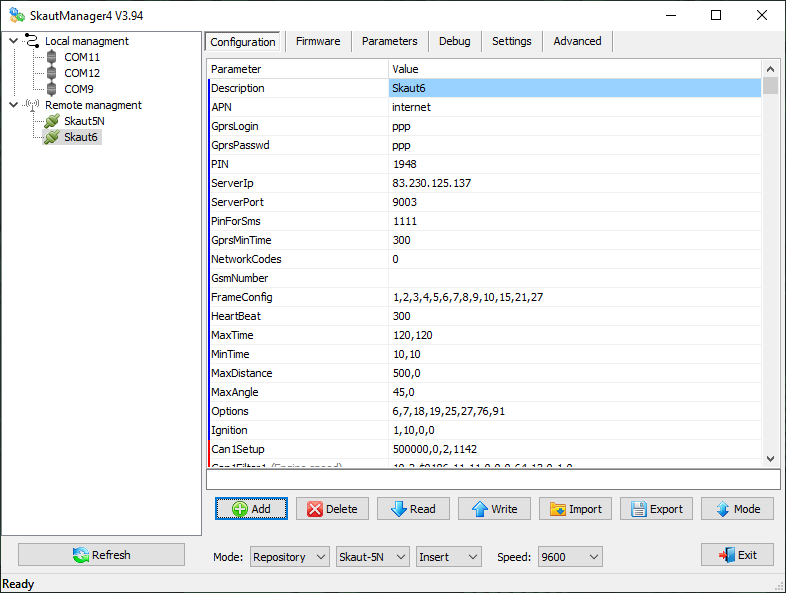
Na konfigurację urządzenia składa się szereg parametrów. Parametr składa się z nazwy i wartości. Wartości można wprowadzać w postaci tekstowej (w formie argumentów oddzielonych przecinkami), ale w programie w większości przypadków z prawej strony wiersza parametru można klikąć przycisk [...] i wprowadzić odpowiednie wartości w dedykowanym okienku.
Zarządzanie listą parametrów umożliwiają przyciski Add oraz Delete. Konfiguracja może mieć dowolną ilość parametrów.
Aby przesłać do urządzenia wprowadzone dane konfiguracyjne, należy nacisnąć przycisk Write. Aby odczytać bieżące dane z urządzenia należy nacisnąć przycisk Read.
Program umożliwia tworzenie predefiniowanych zestawów konfiguracyjnych, pozwalając skopiować raz przygotowaną konfigurację wielokrotnie na inne urządzenia. Aby zapisać do pliku bieżące ustawienia, naciśnij przycisk Export, a następnie wybierz lokalizację i podaj nazwę pliku, pod jaką konfiguracja ma być zapisana. Wczytanie konfiguracji z pliku odbywa się przez naciśnięcie przycisku Import i wybraniu zapisanego wcześniej pliku.
Poniższa tabela opisuje możliwe do ustawienia parametry konfiguracyjne, przy czym w opisie argumentów użyto następujących oznaczeń:
| U8 | Liczba całkowita z zakresu 0 – 255 |
| U16 | Liczba całkowita z zakresu 0 – 65535 |
| U32 | Liczba całkowita z zakresu 0 – 4294967295 |
| float | Liczba zmiennoprzecinkowa np.: 1.2345, -12.345 |
Uwaga: W przypadku liczb zmiennoprzecinkowych jedynym prawidłowym separatorem dziesiętnym jest kropka.
| Nazwa | SMS | Argumenty | Opis |
|---|---|---|---|
| Description | MYID | 15 znaków | Opis tekstowy urządzenia |
| APN | APN | 23 znaki | Nazwa punktu APN |
| APN2 | 23 znaki | ||
| GprsLogin | LOGIN | 15 znaków | Nazwa użytkownika dla GPRS |
| GprsPasswd | PASSWD | 15 znaków | Hasło dla GPRS |
| PIN | SIMPIN | 7 znaków | PIN do karty SIM |
| ServerIp | IP | 23 znaki | Numer IP lub nazwa domenowa serwera |
| ServerIp2 | 23 znaki | Alternatywny numer IP lub nazwa domenowa serwera | |
| ServerPort | PORT | cyfra (U16) | Port TCP/UDP serwera |
| ServerPort2 | cyfra (U16) | Alternatywny port TCP/UDP serwera | |
| PinForSms | SMSPIN | 7 znaków | Kod pin do operacji SMS |
| GprsMinTime | GPRSTIME | cyfra (U32) | Minimalny czas pomiędzy kolejnymi sesjami GPRS |
| NetworkCodes | NETWORK | lista cyfr (U32) do 32 pozycji |
"Biała lista". Lista kodów GSM krajów (np. 260 – Polska) lub kodów krajów z kodami operatorów (np. 26003 – Polska,Orange) w których dozwolony jest GPRS. Zobacz też: Wysyłanie danych w zależności od kraju i operatora |
| GsmNumber | IMBTEL | 15 znaków | Numer telefonu uprawnionego do odblokowania immobilisera |
| FrameConfig | FRAME | lista cyfr (U16) do 32 pozycji |
Lista z identyfikatorami danych, które mają być rejestrowane przez moduł |
| HeartBeat | HEARTBEAT | cyfra (U32) | Czas bezczynności po którym rejestrator zgłasza się do serwera |
| MaxTime | MAXTIME | cyfry (U32,U32) | Maksymalny czas pomiędzy kolejnymi zarejestrowanymi punktami pomiarowymi |
| MinTime | MINTIME | cyfry (U32,U32) | Minimalny czas pomiędzy kolejnymi zarejestrowanymi pomiarami |
| MaxDistance | MAXDIST | cyfry (U32,U32) | Maksymalny dystans pomiędzy kolejnymi zarejestrowanymi pomiarami |
| MaxAngle | MAXANGLE | cyfry (U8, U8) | Zmiana kąta kierunku jazdy powyżej którego następuje rejestracja pomiaru |
| Options | OPTIONS | lista cyfr (U16) do 32 pozycji |
Lista opcji konfiguracyjnych |
| Ignition | --- | cyfry (U16,U16,float,float) | Konfiguracja stacyjki |
| OverSpeed | --- | cyfry (U16,U16,float,float) | Konfiguracja zdarzenia przekroczenia prędkości |
| OverTemp | --- | cyfry (U16,U16,float,float) | Konfiguracja zdarzenia przekroczenia temperatury |
| Negation | --- | lista cyfr (U8) do 8 pozycji |
Negacja wymienionych wejść cyfrowych (1 to DIN0, 2 to DIN1, itd.) |
| Mask | --- | lista cyfr (U8) do 8 pozycji |
Maskowane wejść. Pierwsza cyfra oznacza wejście maskujące, pozostałe wejścia maskowane (1 to DIN0, 2 to DIN1, itd.) |
| DinLoConfig | --- | cyfry (U8,U8,U8,U8,U8,U8,U8,U8) | Minimalny czas wejścia w stanie niskim w 1/10 sek. |
| DinHiConfig | --- | cyfry (U8,U8,U8,U8,U8,U8,U8,U8) | Minimalny czas wejścia w stanie wysokim w 1/10 sek. |
| DOut | --- | cyfry (U8, U8, U8, U8) | Konfiguracja wyjść cyfrowych |
| Immobiliser | --- | cyfra (U8) | Numer wejścia autoryzacyjnego dla immobilisera |
| CanConfigMini | --- | cyfra (U32) | Ustawienia wbudowanych konfiguracji dla poszczególnych magistral CAN. W zależności od urządzenia i ilości dostępnych magistral, poszczególne polecenia pozwala na sterowanie jedną, dwoma lub trzeba magistralami. Lista dostępnych konfiguracji jest tutaj |
| CanConfig | --- | cyfry (U32,U32) | |
| CanConfigEx | --- | cyfry (U32,U32,U32) | |
| CanSetupEx | --- | cyfry (U16, U32, U8, U32, U8, U32, U8) | Konfiguracja 3 interfejsów CAN |
| MaxSpeed | --- | cyfry (float, float) | Prędkość maksymalna do wysłania ramki. Zobacz: Czasy wysyłania danych |
| MinSpeed | --- | cyfry (float, float) | Prędkość minimalna do wysłania ramki. Zobacz: Czasy wysyłania danych |
| FixNowTime | --- | cyfra (U16) | Czas do przejścia GPS w tryb uśpienia |
| ImmoTime | --- | cyfra (U16) | Czas podtrzymania działania immobilisera |
| FixStatTime | --- | cyfra (U16) | Czas oczekiwania na prawidłowe dane z GPS |
| SmartGpsSpeed | --- | cyfra (float) | Prędkość do której nie są aktualizowane dane z GPS |
| BlackNetwork | --- | lista cyfr (U32) do 32 pozycji |
"Czarna lista". Lista kodów GSM krajów (np. 260 – Polska) lub kodów krajów z kodami operatorów (np. 26003 – Polska,Orange) w których zabroniony jest GPRS. Zobacz też: Wysyłanie danych w zależności od kraju i operatora |
| Door | Ustawienia dla opcji 146 | ||
| Can1Setup | --- | cyfry (U32,U8,U8,U16) | Konfiguracja interfejsu CAN |
| Can1Filter<1..32> | --- | cyfry (U16,U8,U32,U8,U8,U16,U8,U8,U8,U8,U8,float,float) | Konfiguracja filtra CAN <1..32> |
| Can1FilterEx<1..32> | --- | cyfry (U16,U8,U32,U8,U8,U16,U8,U8,U8,U8,U8,U8,U8,U8,float,float,float,float) | Konfiguracja filtra CAN <1..32> |
| Can2Setup | --- | cyfry (U32,U8,U8,U16) | Konfiguracja interfejsu CAN2 |
| Can2Filter<1..32> | --- | cyfry (U16,U8,U32,U8,U8,U16,U8,U8,U8,U8,U8,float,float) | Konfiguracja filtra CAN2 <1..32> |
| Can2FilterEx1<1..32> | --- | cyfry (U16,U8,U32,U8,U8,U16,U8,U8,U8,U8,U8,U8,U8,U8,float,float,float,float) | Konfiguracja filtra CAN <1..32> |
| Can3FilterEx1<1..32> | --- | cyfry (U16,U8,U32,U8,U8,U16,U8,U8,U8,U8,U8,U8,U8,U8,float,float,float,float) | Konfiguracja filtra CAN <1..32> |
| JbusFilter<1..32> | --- | cyfry (U16,U8,U8,U8,U8,U8,U8,U8,float,float) | Konfiguracja filtra JBUS |
| JbusFilterEx1<1..32> | --- | cyfry (U16,U8,U8,U8,U8,U8,U8,U8,U8,U8,U8,float,float,float,float) | Konfiguracja filtra JBUS <1..32> |
| D8Filter<1..16> | --- | cyfry (U16,U8,U8,U8,U8,U8,float,float) | Konfiguracja filtra D8 |
| D8FilterEx1<1..32> | --- | cyfry (U16,U8,U8,U8,U8,U8,U8,U8,U8,float,float,float,float) | Konfiguracja filtra D8 <1..16> |
| AccCalib | --- | cyfry (U16,U16,U16) | Kalibracja akcelerometru w 3 osiach. Zobacz też opcję 86. |
| AccEvents | --- | cyfry (float, float, float) | Kalibracja zdarzeń z akcelerometru |
| Continental | --- | cyfry (U16,U8,U8) | Konfiguracja systemu Continental |
| Activity | --- | cyfry (U32) | Maksymalny czas w którym możliwe jest kumulowanie danych o aktywności kierowców |
| DeviceID | --- | cyfry (U32) | Zobacz opis opcji 159 |
| BlueID | |||
| Tachoreader | --- | cyfra (U32) | Prędkość CAN dla Tachoreader GSM |
| ShadowAcc | --- | cyfry (float,float) | Mnożnik dla parametrów Acc1 i Acc2 |
| CanSniffer1 | --- | lista cyfr (U32) do 32 pozycji |
Konfiguracja adresów ramek dla CAN sniffera |
| CanSniffer2 | --- | lista cyfr (U32) do 32 pozycji |
Konfiguracja adresów ramek dla CAN sniffera |
| SnifferName | --- | 15 znaków | Opis plików dla sniffer'a |
| ChangeEvent<1..4> | --- | cyfry (U16,U8,U8,float,float) | Konfiguracja zdarzenia zmiany |
| PowerLevel | --- | cyfra (float) | Poziom akumulatora przy przejściu do stanu Power-Save. Zobacz też opcję 3 i 4 |
| DinLevel | --- | cyfry (float,float) | Poziom napięć dla wejść DIN6 i DIN7 do współpracy z opcją 123. Po więcej szczegółów patrz opis opcji 123. |
| AccessKey | --- | cyfry (U32,U32) | Kod aktywujący pełną funkcjonalność TachoReader |
| WakeUpTimer | --- | cyfra (float) | Czas wybudzenia z uśpienia w sekundach. Zabacz opcje 4, 26, 111 |
| PowerWakeUp | --- | cyfra (float) | Zmiana napięcia powodująca wybudzenie z uśpienia. Zabacz opcje 4, 26, 111 |
| AccWakeUp | --- | cyfra (float) | Wartość przyśpieszenia powodująca wybudzenie z uśpienia. Zabacz opcje 4, 26, 111 |
| eTollMode | --- | cyfra (U8) | Tryb pracy eTool |
| AccToSpn250 | --- | cyfra (U32) | Ilość impulsow w Acc1 na litr paliwa w SPN250. Określa mnożnik: impulsy na litr paliwa przy zliczaniu całkowitego paliwa |
| GpsTreshold | --- | cyfry (U8, U8) | Ilość satelit i minimalny poziom sygnału w dBHz dla wyznaczenia pozycji |
| BleScanCount | --- | cyfra (U8) | Ilość skanowań BLE |
| MinFuel | |||
| CanlogProgNo | --- | cyfry (U32) | Numer programu w przystawce SEO Canlog lub CAN-S. Zobacz też opcje: 181 i 182 |
| CanlogParamCfg | --- | cyfry (U8,U8,U8,U8,U8) | Dodatkowe parametry konfiguracyjne dla przystawek SEO Canlog i CAN-S. Zobacz też opcje: 181 i 182 |
| EN15430Cfg | --- | cyfry (U16,U16) | Ustawienia przystawki dla maszyn drogowych |
| CanlogDTC | --- | cyfry (U16,U16) | Ustawienia przystawki SEO do odczytu DTC |
| Dallas<1..16> | --- | lista max 4 x 16 znaków | Kalibracja masek Dallas (razem 64 maski) |
| Quantizer<1..8> | --- | cyfry (U16,U8,U8,float,float,float) | Konfiguracja kwantyzatora parametrów |
| Vector<1..4> | --- | cyfry (U16,U8,U8,U32) | Konfiguracja wektora parametrów dla eco-driving |
| Matrix<1..4> | --- | cyfry (U16,U8,U8,U8,U32) | Konfiguracja macierzy parametrów dla eco-driving |
| BleFilter<1..16> | --- | cyfry (U16,U8,17 znaków,U8,U8,U16,U8,U8,U8,U8,U8,float,float) | Konfiguracja filtra BLE |
| BleFilter<17..32> | --- | cyfry (U16,U8,17 znaków,U8,U8,U16,U8,U8,U8,U8,U8,float,float) | Dodatkowa konfiguracja filtra BLE |
| TermID<1..24> | --- | U32 | Identyfikatory termometrów |
| Meshtastic | --- | cyfry (U8,U8,U8,22 znaki,5 znaków,S8,U8,U32,U32,U32) | Konfiguracja modulu LoRa |
| CiA422Filter<1..48> | --- | cyfry (U16,U8,U16,U8,U8) | Filtry dla CiA422 |
| Cia422Map<1..16> | --- | cyfry (U16,U16,U16,U8,U8,U8,U8,U8,float,float,float,float) | Mapowanie dla CiA422 |
| Cia422SdoPool<1..8> | --- | cyfry (U16,U8,U8,U16,U8,U16,U8) | Konfiguracja odpytań SDO dla CiA422 |
¶ Parametr FrameConfig
Ten parametr zawiera listę danych, które mają być wysyłane na serwer. Pamiętaj, że w rejestratorze można zdefiniować bardzo dużo informacji, które on analizuje i gromadzi, ale tylko maksymalnie 32 zestawy wskazane w tym miejscu będą wysyłane w ramce. Zestaw w tym wypadku oznacza grupę danych zgodnie z poniższą tabelą.
Przykład: Parametr
FrameConfig=1spowoduje wysłanie na serwer danych: FixStatus, SatellitesUsed, Latitude i Longitude.
W wersjach firmware starszych niż 364 (marzec 2023) w jednej ramce danych można wysłać maksymalnie 256 bajtów danych. W późniejszych wersjach wydłużono tą wartość do 512 bajtów (zobacz też opis opcji 147). Na dole okna do definiowania parametru FrameConfig zamieszczono licznik informujący o tym ile miejsca w ramce zajmą aktualnie zaznaczone elementy. Przekroczenie limitu ramki nie spowoduje błędu, ale parametry, które się w niej nie zmieszczą, nie zostaną wysłane.
| Frame config | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Identyfikator | Rejestrowane parametry | Rozmiar | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
| 1 | FixStatus | SatelitesUsed | Latitude | Longitude | 12 | ||||
| 2 | MslAltitude | Altref | 10 | ||||||
| 3 | Cogt | Kph | 10 | ||||||
| 4 | Distance | DateTime | AntStatus | 13 | |||||
| 5 | RawDigital | HighDigital | LowDigital | 5 | |||||
| 6 | Power | Battery | AnalogInput | Temperature | 18 | ||||
| 7 | SignalLevel | NetworkCode | 7 | ||||||
| 8 | Lac | Ci | 6 | ||||||
| 9 | NoisePerMs | AgcCnt | JamInd | 7 | |||||
| 10 | CanId | Spn190 | Spn84 | Spn917 | 20 | ||||
| 11 | Spn96 | Spn250 | Spn247 | 14 | |||||
| 12 | Spn110 | Spn172 | Spn175 | 10 | |||||
| 13 | Spn91 | Spn521 | 10 | ||||||
| 14 | Spn523 | Spn520 | Spn595 | Spn596 | Spn1611 | Spn1612 | Spn1613 | 9 | |
| 15 | RawVirt | ChgVirt | 6 | ||||||
| 16 | Imp0 | Imp1 | Imp2 | Imp3 | 18 | ||||
| 17 | Freq0 | Freq1 | Freq3 | Freq4 | 10 | ||||
| 18 | TagId | 18 | |||||||
| 19 | DriverId0 | DriverId1 | 34 | ||||||
| 20 | Level0 | Level1 | Level2 | Level3 | 10 | ||||
| 21 | AccTemp | AccX | AccY | AccZ | 16 | ||||
| 22 | Spn597 | Spn180 | Spn181 | 11 | |||||
| 23 | Spn582_0 | Spn582_1 | Spn582_2 | Spn582_3 | 18 | ||||
| 24 | LdwR | LdwL | Ttc | Fcw | 10 | ||||
| 25 | Brake | Accel | Corner | 8 | |||||
| 26 | DrivingState | EcoRating | DrivingScore | 5 | |||||
| 27 | Quantizer0 | Quantizer1 | Quantizer2 | Quantizer3 | QuantiChg1 | 7 | |||
| 28 | Quantizer4 | Quantizer5 | Quantizer6 | Quantizer7 | QuantiChg2 | 7 | |||
| 29 | FixStat2 | Latitude1 | Longitude1 | Latitude2 | Longitude2 | Latitude3 | Longitude3 | 28 | |
| 30 | Trailer1 | Trailer2 | 10 | ||||||
| 31 | UTCTime | 6 | |||||||
| 32 | Spn899 | Spn513 | 4 | ||||||
| 33 | Spn169_0 | Spn169_1 | Spn169_2 | Spn169_3 | 18 | ||||
| 34 | Spn169_4 | Spn169_5 | Spn169_6 | Spn169_7 | 18 | ||||
| 35 | BBMem | MSGMem | 6 | ||||||
| 36 | KphStatus | Kph1 | Kph2 | Kph3 | 16 | ||||
| 37 | FreqStatus | Freq1 | Freq2 | Freq3 | 10 | ||||
| 38 | Virt1OnTimer | Virt1OffTimer | 10 | ||||||
| 39 | Virt2OnTimer | Virt2OffTimer | 10 | ||||||
| 40 | Virt3OnTimer | Virt3OffTimer | 10 | ||||||
| 41 | Virt4OnTimer | Virt4OffTimer | 10 | ||||||
| 42 | spn235 | spn1761 | spn3484 | 11 | |||||
| 43 | Spn354_0 | Spn354_1 | Spn354_2 | Spn354_3 | 18 | ||||
| 44 | Spn354_4 | Spn354_5 | Spn354_6 | Spn354_7 | 18 | ||||
| 45 | Spn168_0 | Spn168_1 | Spn168_2 | Spn168_3 | 18 | ||||
| 46 | Spn168_4 | Spn168_5 | Spn168_6 | Spn168_7 | 18 | ||||
| 47 | Spn169_8 | Spn169_9 | 10 | ||||||
| 48 | Spn354_8 | Spn354_9 | 10 | ||||||
| 49 | Spn168_8 | Spn168_9 | 10 | ||||||
| 50 | RSSI_0 | RSSI_1 | RSSI_2 | RSSI_3 | 6 | ||||
| 51 | RSSI_4 | RSSI_5 | RSSI_6 | RSSI_7 | 6 | ||||
| 52 | RSSI_8 | RSSI_9 | 4 | ||||||
| 53 | AnalogInput4 | AnalogInput5 | 10 | ||||||
| 54 | Spn169_10 | Spn169_11 | Spn169_12 | Spn169_13 | 18 | ||||
| 55 | Spn169_14 | Spn169_15 | Spn169_16 | Spn169_17 | 18 | ||||
| 56 | Spn169_18 | Spn169_19 | 10 | ||||||
| 57 | Spn169_20 | Spn169_21 | Spn169_22 | Spn169_23 | 18 | ||||
| 58 | Spn169_24 | Spn169_25 | Spn169_26 | Spn169_27 | 18 | ||||
| 59 | Spn169_28 | Spn169_29 | 10 | ||||||
| 60 | Spn354_10 | Spn354_11 | Spn354_12 | Spn354_13 | 18 | ||||
| 61 | Spn354_14 | Spn354_15 | Spn354_16 | Spn354_17 | 18 | ||||
| 62 | Spn354_18 | Spn354_19 | 10 | ||||||
| 63 | Spn354_20 | Spn354_21 | Spn354_22 | Spn354_23 | 18 | ||||
| 64 | Spn354_24 | Spn354_25 | Spn354_26 | Spn354_27 | 18 | ||||
| 65 | Spn354_28 | Spn354_29 | 10 | ||||||
| 66 | Spn168_10 | Spn168_11 | Spn168_12 | Spn168_13 | 18 | ||||
| 67 | Spn168_14 | Spn168_15 | Spn168_16 | Spn168_17 | 18 | ||||
| 68 | Spn168_18 | Spn168_19 | 10 | ||||||
| 69 | Spn168_20 | Spn168_21 | Spn168_22 | Spn168_23 | 18 | ||||
| 70 | Spn168_24 | Spn168_25 | Spn168_26 | Spn168_27 | 18 | ||||
| 71 | Spn168_28 | Spn168_29 | 10 | ||||||
| 72 | Level4 | Level5 | Level6 | Level7 | 10 | ||||
| 73 | TagId2 | 18 | |||||||
| 74 | spreading | plow | brine_dosage_ml | brine_dosage_g | spreading_dosage_1 | spreading_dosage_2 | spreading_width | spreading_width_left | 28 |
| 75 | material_total_1 | material_total_2 | brine_total_liters | spreading_total_dist | spreader_oper_time | simulation_speed | 26 | ||
| 76 | interface_status | connection_flags | 8 | ||||||
| 77 | security_flags | state_flags | indicator_flags | 32 | |||||
| 78 | BatteryRangeKm | BatteryVoltageV | EReadyFlag | ChargeCurrentA | PowerUsageA | 15 | |||
| 79 | Cia422BcReady | Cia422BcActive | 4 | ||||||
| 80 | Cia422Lu1Ready | Cia422Lu1Active | Cia422Lu1Move | Cia422Lu1Wu | Cia422Lu1Cu | Cia422Lu1Window | Cia422Lu1Bin | Cia422Lu1Position | 13 |
| 81 | Cia422Lu2Ready | Cia422Lu2Active | Cia422Lu2Move | Cia422Lu2Wu | Cia422Lu2Cu | Cia422Lu2Window | Cia422Lu2Bin | Cia422Lu2Position | 13 |
| 82 | Cia422Lu3Ready | Cia422Lu3Active | Cia422Lu3Move | Cia422Lu3Wu | Cia422Lu3Cu | Cia422Lu3Window | Cia422Lu3Bin | Cia422Lu3Position | 13 |
| 83 | Cia422Lu4Ready | Cia422Lu4Active | Cia422Lu4Move | Cia422Lu4Wu | Cia422Lu4Cu | Cia422Lu4Window | Cia422Lu4Bin | Cia422Lu4Position | 13 |
| 84 | Cia422CuReady | Cia422CuActive | Cia422CuPosition | Cia422CuReqSpeed | Cia422CuReqHydraulic | Cia422CuReqDrive | 8 | ||
| 85 | Cia422CuBcSpeed | Cia422CuBcHydraulic | Cia422CuBcDrive | Cia422CuBcReserved1 | Cia422CuBcReserved2 | Cia422CuBcReserved3 | 8 | ||
| 86 | Cia422Bcu1Ready | Cia422Bcu1Active | Cia422Bcu1LuPause | Cia422Bcu1Wu | Cia422Bcu1LuStop | Cia422Bcu1Volume | 11 | ||
| 87 | Cia422Bcu2Ready | Cia422Bcu2Active | Cia422Bcu2LuPause | Cia422Bcu2Wu | Cia422Bcu2LuStop | Cia422Bcu2Volume | 11 | ||
| 88 | Cia422Bcu3Ready | Cia422Bcu3Active | Cia422Bcu3LuPause | Cia422Bcu3Wu | Cia422Bcu3LuStop | Cia422Bcu3Volume | 11 | ||
| 89 | Cia422Bcu4Ready | Cia422Bcu4Active | Cia422Bcu4LuPause | Cia422Bcu4Wu | Cia422Bcu4LuStop | Cia422Bcu4Volume | 11 | ||
| 90 | Cia422HeartbeatState | Cia422HeartbeatReady | Cia422EmcyCode | Cia422EmcyRegister | Cia422PdoRx | 8 | |||
| 10001 | UserChar1 | UserChar2 | UserChar3 | UserChar4 | 6 | ||||
| 10002 | UserShort1 | UserShort2 | UserShort3 | UserShort4 | 10 | ||||
| 10003 | UserInt1 | UserInt2 | UserInt3 | UserInt4 | 18 | ||||
| 10004 | UserLong1 | UserLong2 | UserLong3 | UserLong4 | 34 | ||||
| 10005 | UserFloat1 | UserFloat2 | UserFloat3 | UserFloat4 | 18 | ||||
| 10006 | UserDouble1 | UserDouble2 | UserDouble3 | UserDouble4 | 34 | ||||
| 20001 | Acc1 | Acc2 | 10 | ||||||
| 20002 | ShadowAcc1 | ShadowAcc2 | 10 | ||||||
| 20003 | StickyBits1 | StickyMask1 | StickyChg1 | 8 | |||||
| 20004 | StickyBits2 | StickyMask2 | StickyChg2 | 8 | |||||
| 30001 | BleParam1 | BleParam2 | BleParam3 | BleParam4 | BleParam5 | BleParam6 | BleParam7 | BleParam8 | 16 |
¶ Parametr Options
Ten parametr pozwala na dostosowanie pracy rejestratora do konkretnych potrzeb. Może to być aktywacja niektórych funkcji lub specjalnego sposobu działania. Poszczególne argumenty można odzielać przecinkiem lub wyklikiwać w okienku.
| Options | ||||
|---|---|---|---|---|
| # | Nazwa PL | Nazwa EN | Opis | Oprogramowanie |
1 |
Wysłanie ramki przy zmianie wejścia DIN0 | Send frame on DIN0 change | Powoduje wysłanie ramki po zmianie wejścia DIN0 zarówno ze stanu niskiego na wysoki lub z wysokiego na niski. Bierze dodatkowo pod uwagę parametr MinTime. | |
2 |
Wysłanie ramki przy zmianie wejścia DIN1 | Send frame on DIN1 change | Powoduje wysłanie ramki po zmianie wejścia DIN1 zarówno ze stanu niskiego na wysoki lub z wysokiego na niski. Bierze dodatkowo pod uwagę parametr MinTime. | |
3 |
Wysłanie ramki przy zaniku/powrocie zasilania | Send frame on power loss/return | Powoduje wysłanie ramki po przekroczeniu progu 10.2V (nie bierze pod uwagę wartości wprowadzonej parametrem PowerLevel) napięcia zasilania 'w górę' lub 'w dół'. Bierze dodatkowo pod uwagę parametr MinTime. | |
4 |
Wyłączenie zasilania przy słabym akumulatorze | Power off when power supply is low | Powoduje wyłączenie zasilania (w rejestratorach Skaut4 lub starszych) lub przejście w stan uśpienia (w nowszych niż Skaut4) po zejściu poniżej progu 10.2V (lub wartości wprowadzonej parametrem PowerLevel) napięcia zasilania rejestratora. Ponowne włączenie określa parametr PowerWakeUp. | |
5 |
Czasy wysyłania w zależności od kodów sieci a nie stanu stacyjki | Send times depend on NETWORK codes | Zobacz: Wysyłanie danych w zależności od kraju i operatora | |
6 |
Zapominaj dane CAN, JBUS, D8, BLE | Forget CAN, JBUS, D8, BLE data | Po 30 sekundach od zaniknięcia danych na magistralach CAN, JBUS, D8, BLE rejestrator "zapomina" odczytane z nich wartości. Domyślnie ostatnia wartość jest zapamiętywana i powtarzana do czasu pojawienia się nowej. | |
7 |
Wysłanie ramki przy zmianie wyjścia VIRT0 (flaga Ignition) | Send frame on VIRT0 change (Ignition flag) | Powoduje wysłanie ramki po zmianie stanu stacyjki, opisanego parametrem Ignition. Bierze dodatkowo pod uwagę parametr MinTime. | |
8 |
Wysłanie ramki przy zmianie wyjścia VIRT1 (flaga OverSpeed) | Send frame on VIRT1 change (over speed flag) | W momencie przekroczenia wartości zdefiniowanych parametrem OverSpeed wysyłana jest ramka z danymi. Wysłanie ramki ma miejsce przy przekroczeniu parametru 'w górę' oraz 'w dół'. Musi być dodatkowo spełniony warunek MinTime. | |
9 |
Sygnalizacja przekroczenia prędkości na OUT3 | Overspeed signaling on OUT3 (S8:OUT2) | Stan przekroczenia wartości zdefiniowanych parametrem OverSpeed sygnalizowany jest na wyjściu OUT3 (S8:OUT2). Zobacz też opcję 99. | |
10 |
Zaawansowane zarządzanie parametrem MINTTIME | Advanced management of MINTIME parameter | ||
11 |
Wysłanie ramki przy zmianie wejścia DIN2 | Send frame on DIN2 change | Powoduje wysłanie ramki po zmianie odpowiedniego wejścia zarówno ze stanu niskiego na wysoki lub z wysokiego na niski. Bierze dodatkowo pod uwagę parametr MinTime. | |
12 |
Wysłanie ramki przy zmianie wejścia DIN3 | Send frame on DIN3 change | ||
13 |
Wysłanie ramki przy zmianie wejścia DIN4 | Send frame on DIN4 change | ||
14 |
Wysłanie ramki przy zmianie wejścia DIN5 | Send frame on DIN5 change | ||
15 |
Wysłanie ramki przy zmianie wejścia DIN6 | Send frame on DIN6 change | ||
16 |
Wysłanie ramki przy zmianie wejścia DIN7 | Send frame on DIN7 change | ||
17 |
Neguj wyjścia cyfrowe OUT0 i OUT1 | Negate digital outputs OUT0/1 (S8:OUT3) | Zmienia logikę działania wskazanych wyjść na odwrotną. Zobacz też opcję 27. | |
18 |
Funkcja immobilisera na OUT2/3 (S8:OUT1/2) | Immobilizer mode on OUT2/3 (S8:OUT1/2) | Włącza funkcję immobilizera. Funkcja powoduje rozwarcie wyjść OUT2 i OUT3 (S8:OUT1 i 2) w momencie włączenia stacyjki, a następnie ich zwarcie po prawidłowej autoryzacji. Drugie z wejść może działać inaczej w zależności od opcji 19. Zobacz też opcję 75. | |
19 |
Sygnalizacja braku autoryzacji na OUT3 (S8:OUT2) | Unauthorized status signaling on OUT3 (S8:OUT2) | Zmienia działanie drugiego z wejść wymienionych w opcji 18. Po 30 sekundach braku autoryzacji włącza sygnalizację na wyjściu OUT3 (S8:OUT2). Może to być np. sygnalizator dźwiękowy. Nieużywany z czytnikiem RFID, bo wtedy sygnalizator jest zainstalowany w czytniku. Wymaga włączenia opcji 18. Zobacz też opcję 99. | |
20 |
Filtrowanie wejścia analogowego AN2 | AN2 analog input filtering | Opcja włącza filtrowanie danych z odpowiedniego wejścia analogowego. Odrzuca nagłe duże odchylenia od poprzednich wartości. Używana np. przy filtrowaniu danych z pływaka. | |
21 |
Filtrowanie wejścia analogowego AN3 | AN3 analog input filtering | ||
22 |
Zatrzaskiwanie wartości AN2 na czas braku stacyjki | Latching the AN2 value when ignition is off | Po wyłączeniu stacyjki zapamiętuje ostatnią wartość odpowiedniego wejścia analogowego. Można je łączyć z opcjami 20 i 21, wtedy zapamiętywana jest wartość przefiltrowana. | |
23 |
Zatrzaskiwanie wartości AN3 na czas braku stacyjki | Latching the AN3 value when ignition is off | ||
24 |
Tryb obniżonego poboru mocy GSM | GSM low power mode | (Oszczędzanie energii) Po 15 minutach od wyłączeniu stacyjki usypiany jest moduł GSM, a następnie włączany co 6 godzin po to, żeby wysłać wszystkie dane zgromadzone w tym czasie. | |
25 |
Tryb obniżonego pobory mocy GPS | GPS low power mode | (Oszczędzanie energii) Po wyłączeniu stacyjki powoduje, że moduł GPS jest usypiany i wybudzany raz na minutę. Efektem ubocznym mogą być większe błędy pozycji GPS. | |
26 |
Tryb automatycznego uśpienia | Auto sleep mode | (Oszczędzanie energii) Powoduje przejście w stan uśpienia 15 minut po wyłączeniu stacyjki. Porównaj opcję 111. Uwaga: w zależności od urządzenia wybudzenie następuje po: aktywacji wejścia DIN0 (w każdym urządzeniu) lub DIN1, zmiana zasilania, akcelerometr, timer (S8, S9, S10). | |
27 |
Negowanie wyjść cyfrowych OUT2 i OUT3 | Negate digital outputs OUT2/3 (S8:OUT1/2) | Zmienia logikę działania wskazanych wyjść na odwrotną (wyjścia sterowane masą). Zobacz też opcję 17. | |
28 |
Użycie poprawek EGNOS | Use EGNOS patches | Powoduje włączenie korzystania z poprawek EGNOS do zwiększenia dokładności lokalizacji. Poprawki EGNOS są wymagane np. przy korzystaniu z eTOLL (opcja 131.) | |
29 |
Odczytywanie nr karty kierowcy z CAN | Read driver card number from CAN | Włączenie opcji powoduje czytanie nr karty kierowcy z CAN. Domyślnie karta jest odczytywana z D8. | |
30 |
Tryb pomiarów impulsów z przepływomierzy paliwa | Pulse measurement mode from fuel flow meters | Włącza filtrowanie zakłóceń na wejściach impulsowych. Efektem ubocznym jest zmniejszenie szybkości impulsów z 20000/s do ok. 200/s.). Opcja użyteczna m.in. przy podłączaniu przepływomierzy. | |
31 |
Wsparcie dla sond Perpetuum | Support for Perpetuum probes | (Dotyczy sond Perpetuum) Włącza wsparcie dla sond Perpetuum. Zobacz też opcję 155. | |
32 |
Wsparcie dla sond Aplisens (9600bps) | Support for Aplisens probes (9600bps) | (Dotyczy sond Aplisens) Włącza wsparcie dla sondy Aplisens na wskazanej prędkości. Uwaga: magistrala JBUS przełączana jest wtedy w tryb RS485, dlatego nie będą działać inne urządzenia pracujące na JBUS. Zobacz też opcję 150. | |
33 |
Wsparcie dla sond Aplisens (4800bps) | Support for Aplisens probes (4800bps) | ||
34 |
Tryb obniżonego poboru mocy USB | USB low power mode | (Nieużywana) Był używany w rejestratorach z portem host USB. W momencie wyłączenia stacyjki wyłączał urządzania podpięte po USB. | |
35 |
Obsługa terminala z czytnikiem kart kierowcy | Support for manual driver card reader | Włącza obsługę ręcznego czytnika kart kierowców po porcie RS232. | |
36 |
Udostępniania połączenia sieciowego | Network connection sharing | Powoduje udostępnianie połączenia sieciowego dla urządzenia podpiętego przez RS232. | |
37 |
Zdalne pobieranie danych z tachografu | Tachograph remote data downloading | (Dotyczy tachografów) Włącza funkcję zdalnego pobierania danych z tachografu na CAN2 i jednocześnie wymusza tryb komunikacji dwustronnej. W rejestratorach bez wbudowanej funkcji pobierania włączał obsługę zewnętrznej przystawki TachoReader. Zobacz też opcję 39. | |
38 |
Watchdog BT-SPP/Zatrzaskiwanie karty kierowcy z CAN | Watchdog BT-SPP/Parse driver card logout | W starych rejestratorach z portem Host USB powodował reset Bluetooth dongle połączonego do tego portu. W pozostałych wersjach począwszy od firmware 8.0XX.426 powoduje zatrzaskiwanie karty kierowcy po wyłączeniu stacyjki (dotyczy tylko danych z CAN, bo D8 pozostaje bez zmian). Było to związane z implementacją parsowania złożonych ramek CAN. | |
39 |
Wsparcie dla tachografów Stoneridge | Support for Stoneridge tachographs | (Dotyczy tachografów) Włącza zgodność z tachografami Stoneridge (domyślnie jest VDO/EFAS). W wersjach firmware starszych od 8.0XX.434 poprawne wskazanie tachografu było potrzebne do prawidłowej realizacji zdalnego zrzutu danych oraz poprawnego dekodowania czasu z magistrali D8. W nowszych wersjach detekcja tachografu przy zrzucia danych odbywa się automatycznie, ale opcja wziąż jest wymagana do poprawnego dekodowania danych z D8 w tachografach Stoneridge (inna prędkość wysyłania danych). | |
40 |
Wsparcie dla sond paliwa H-01 | Support for H-01 fuel probes | Włącza wsparcie dla obsługi sond paliwa Harteq, podłączanych do magistrali JBUS. | |
41 |
Wsparcie dla MDAS20 | Support for MDAS20 | Włącza wsparcie dla urządzenia MDAS20, podłączonego przez RS232. MDAS20 służył do monitorowania pasa ruchu i odległości od pojazdu poprzedzającego. | |
42 |
Wsparcie dla przystawki D8-JBUS | Support for the D8-JBUS adapter | Włącza wsparcie dla zewnętrznych przystawek TachoBus do podpięcia D8. Opcja nie jest potrzebna w urządzeniach z wbudowanym wejściem D8. | |
43 |
Wsparcie dla przystawki CAN Ext | Support for the CAN Ext adapter | Włącza wsparcie dla przystawki CAN Ext, pozwalając na rozszerzenie wejścia CAN o dodatkową magistralę. | |
44 |
Wsparcie dla GARMIN-FMI | Support for GARMIN-FMI | Włącza wsparcie dla protokołu Garmin FMI przez port RS232. | |
45 |
Automatyczne czyszczenie czarnej skrzynki | Automatic black box cleaning | (Opcja dedykowana) Włącza dodatkowy poziom bezpieczeństwa danych. Po wysłaniu ramki na serwer i odebraniu potwierdzenia, rejestrator usuwa ją z pamięci. Uniemożliwia to dostęp do historycznych danych po utracie urządzenia. | |
46 |
Odpytywanie magistrali J1708 (motogodziny i skumulowane paliwo) | Polling on J1708 bus (total work hours and total fuel) | Włączenie opcji powoduje cykliczne wysyłanie na magistrali JBUS zapytań o motogodziny i skumulowane paliwo. Dotyczy to niektórych starych wersji ciągników siodłowych Mercedes i Volvo, posiadających jeszcze magistralę JBUS. Wartości o których mowa wysyłane były tylko w odpowiedzi na zapytanie. | |
47 |
Wysłanie ramki przy zmianie nr karty kierowcy | Send frame on driver card numer change | Powoduje wysłanie ramki od razu po zauważeniu zmiany nr karty kierowcy na magistrali CAN lub D8. Wymaga spełnienia warunku MinTime. | |
48 |
Wysłanie ramki przy zmianie numeru pastylki DALLAS | Send frame on DALLAS iButton change | Powoduje wysłanie ramki od razu po zauważniu zmiany numeru pastyli autoryzacyjnej. Wymaga spełnienia warunku MinTime. | |
49 |
Odbieraj przychodzące połączenia typu audio | Answer incoming audio calls | (Nieużywana) Historycznie powodowała automatyczne odbieranie przychodzących połączeń głosowych i np. nasłuchu wnętrza pojazdu. Wymagała urządzeń z modemami obsługującymi połączenia audio i wyposażonych w wejścia typu jack do podłączenia mikrofonu. | |
50 |
Próbuj nawiązać połączenie TCP bez restartu sesji GPRS | Try to establish a TCP connection without restarting the GPRS session | Próbuje podtrzymać aktualną sesję GPRS. Po rozłączeniu najpierw próbuje odnowić połączenie korzystając z aktualnej sesji GPRS, a dopiero w przypadku niepowodzenia restartuje modem i odnawia sesję GPRS. Pozwala ograniczyć koszty. | |
51 |
Nie rejestruj danych gdy DIN1 jest wysoki | Do not record data where DIN1 is high | Jeśli jest włączona i jeśli na wejściu DIN1 jest stan wysoki, rejestrator nie wysyła żadnych danych, poza danymi eTOLL. Uwaga: ta opcja nie włącza trybu jazdy prywatnej, a jedynie blokuje wysyłanie. Porównaj z opcjami: 100, 101 i 102. | |
52 |
Magnetyczna pastylka DALLAS | Dallas magnetic iButton | Opcja dedykowana pastylkom magnetycznym, które przyłożone są na stałe do czytnika. Autoryzacja trwa tak długo, jak długo pastylka jest w zasięgu. Autoryzacja jest wyłączana 60 sekund po zabraniu pastylki z zasięgu czytnika. | |
53 |
Wsparcie dla przystawki Digidown/Nie wysyłaj ramki z TachoFirmware | Support for Digidown/Do not send TachoFirmware | W rejestratorach starszych niż Skaut-7 opcja włączała wsparcie dla urządzeń Digidown do zdalnego pobierania danych z tachografu. W Skaut7 i nowszych, począwszy od firmware w wersji 8.0XX.434 powoduje wyłączenie wysyłania informacji TachoFirmware z wersją podłączonego tachografu oraz innych rozszerzeń protokołu (ramek z wersją listy dallas i update tych informacji). To opcja przejściowa w sytuacji, gdy serwer nie jest przygotowany na odbiór tego typu ramek. | |
54 |
Watchdog USB-D8 | Watchdog USB-D8 | ( |
8.xxx.470, 10.xxx.490 |
55 |
Czasy wysyłania danych w zależności od pozycji na "białej liście" | Send times depend on position on "white list" | Powiązana z opcją 5. Zobacz: Wysyłanie danych w zależności od kraju i operatora | |
56 |
Wysłanie ramki przy zmianie stanu kwantyzatora 1 | Send frame on quantizer 1 change | Powoduje wysłanie ramki od razu po zmianie zawartości odpowiedniego kwantyzatora. Musi być dodatkowo spełniony warunek na MinTime. | |
57 |
Wysłanie ramki przy zmianie stanu kwantyzatora 2 | Send frame on quantizer 2 change | ||
58 |
Wysłanie ramki przy zmianie stanu kwantyzatora 3 | Send frame on quantizer 3 change | ||
59 |
Wysłanie ramki przy zmianie stanu kwantyzatora 4 | Send frame on quantizer 4 change | ||
60 |
Wysłanie ramki przy zmianie stanu kwantyzatora 5 | Send frame on quantizer 5 change | ||
61 |
Wysłanie ramki przy zmianie stanu kwantyzatora 6 | Send frame on quantizer 6 change | ||
62 |
Wysłanie ramki przy zmianie stanu kwantyzatora 7 | Send frame on quantizer 7 change | ||
63 |
Wysłanie ramki przy zmianie stanu kwantyzatora 8 | Send frame on quantizer 8 change | ||
64 |
Używaj czasu z D8 lub CAN w strumieniu 'activity' | Use time from D8 or CAN in 'activity' stream | Razem z opcją 110 określa skąd pobierać czas do aktywności kierowcy (same aktywności określone są filtrem, ale czas brany jest wg tych opcji). Jeśli ta opcja jet aktywna, źródło czasu określone jest w opcji 110. Jeśli opcja jest nieaktywna, czas pobierany jest w zegara RTC rejestratora (synchronizowanego z serwerem). | |
65 |
Ustaw prędkość 230400 bps dla RS232 | Set 230400 bps for RS232 | Przełącza prędkość portu RS232 na prędkość 230 kb/s z domyślnych 9600 bps. Zobacz też opcję 104 i 130. | |
66 |
Obsługa skanera USB | Support for USB scanner | Dodanie wsparcia dla skanerów USB (IriScan). | |
67 |
Wysyłaj zdarzenia CONNECT i DISCONNECT z BT | Send CONNECT and DISCONNECT events from BT | (Nieużywana) Historycznie używana z Bluetooth Dongle podłączane do portu USB (Skaut4-5). Rejestrator wysyłał na serwer zdarzenia CONNECT i DISCONNECT odebrane z tej przystawki. | |
68 |
Alternatywne wzory ECO-DRIVING | Alternative ECO-DRIVING patterns | (Opcja dedykowana) Powoduje użycie alternatywnego sposobu określania stanu jazdy pojazdu (pole 0x50 w danych - 'drivingstate'). | |
69 |
Obsługa interfejsu WIEGAND | Support for WIEGAND interface | Dodaje obsługę czytników w standardzie Wiegand. Dla podłączenia czytników Wiegand patrz instrukcja. | |
70 |
Wysłanie ramki przy zmianie stanu StickyBits1 | Send frame on StickyBits1 change | Powoduje wysłanie ramki od razu po zmianie zawartości pola StickyBits1. Uwaga: musi być dodatkowo spełniony warunek MinTime. | |
71 |
Wysłanie ramki przy zmianie stanu StickyBits2 | Send frame on StickyBits2 change | Powoduje wysłanie ramki od razu po zmianie zawartości pola StickyBits2. Uwaga: musi być dodatkowo spełniony warunek MinTime. | |
72 |
Wysłanie ramki przy zmianie aktywności kierowcy | Send frame on driver activity change | Powoduje wysłanie ramki od razu po zmianie aktywności kierowcy (zdefiniowanych filtrami). Uwaga: musi być dodatkowo spełniony warunek MinTime. Ta opcja ma sens wyłącznie jeśli aktywności kierowcy wysyłane są w standardowej ramce, a nie kanałem asynchronicznym. | |
73 |
Wsparcie dla TrailerID JBUS | Support for TrailerID JBUS | Dodaje obsługę TrailerID v1. Dla wersji v2 zobacz opcję 163. | |
74 |
Wsparcie dla UniqueReader JBUS | Support for UniqueReader JBUS | Dodaje obsługę czytników RFID. | |
75 |
Aktywuj immobiliser po wybudzeniu | Activate immobilizer after waking up | (Dla skuterów) Opcja zmienia domyślne zachowanie immobilizera po starcie urządzenia. Po jej włączeniu immobilizer po restarcie rejestratora będzie blokował rozruch. Domyślnie blokada jest zdjęta, żeby uniknąć zablokowania pojazdu np. w trakcie jazdy. Wymaga włączenie opcji 18. | |
76 |
Wsparcie dla konwertera JBUS-ANDROID | Support for the JBUS-ANDROID converter | Dodaje obsługę przystawki AndroidPlug, umożliwiając komunikację z urządzeniami Android, dodając dodatkową magistralę CAN lub zarządzając ładowaniem tabletów po Bluetooth. | |
77 |
||||
78 |
Wysłanie ramki przy zmianie wyjścia VIRT2 (OverTemp) | Send frame on VIRT2 change (OverTemp) | W momencie przekroczenia wartości zdefiniowanych parametrem OverTemp wysyłana jest ramka z danymi. Wysłanie ramki ma miejsce przy przekroczeniu parametru 'w górę' oraz 'w dół'. Musi być dodatkowo spełniony warunek MinTime. | |
79 |
Sygnalizacja przekroczenia temperatury na OUT3 | Overtemperature signal on OUT3 (S8:OUT2) | Stan przekroczenia wartości zdefiniowanych parametrem OverTemp sygnalizowany jest na wyjściu OUT3 (S8:OUT2). Zobacz też opcję 99. | |
80 |
Logowanie danych (CAN, JBUS, D8) na USB | Logging bus data on USB | (Nieużywana) Historycznie służyła w Skaut3 do zapisu danych na pendrive podłączonym do portu USB. | |
81 |
Filtrowanie danych z pola 'kph' | Filtering data from 'kph' | Opcja włącza filtrowanie danych o prędkości z GPS. Odrzuca nagłe duże odchylenia od poprzednich wartości. | |
82 |
Filtrowanie danych z pola 'spn84' | Filtering data from 'spn84' | Opcja włącza filtrowanie danych o prędkości z CAN. Odrzuca nagłe duże odchylenia od poprzednich wartości. | |
83 |
Filtrowanie danych z pola 'spn917' | Filtering data from 'spn917' | Opcja włącza filtrowanie danych o przebiegu z CAN. Odrzuca nagłe duże odchylenia od poprzednich wartości. | |
84 |
Filtrowanie danych z pola 'spn250' | Filtering data from 'spn250' | Opcja włącza filtrowanie danych o skumulowanym zurzyciu paliwa z CAN. Odrzuca nagłe duże odchylenia od poprzednich wartości. | |
85 |
Aktywacja usługi CAN sniffer | Activate CAN sniffer service | Opcja wyłącznie dla rejestratorów starszych niż Skaut7, wykorzystywana w autobusach elektrycznych do rejestrowania całego ruchu na magistrali CAN. Wyklucza się z opcją 37 (wsparcie dla TachoReader). W Skaut7 i nowszych opcja nie jest używana. | |
86 |
Automatyczna kalibracja czujnika przyśpieszenia | Automatic calibration of acceleration sensor | Po włączeniu rejestrator przez jakiś czas analizuje zdarzenia akcelerometru i automatycznie kalibruje go określając wartości parametru AccCalib. | |
87 |
Wejście DIN3 steruje wyjściem DOU3 | DIN3 input controls DOUT3 output (S8:OUT2) | Włączenie opcji powoduje powielanie stanu wejścia DIN3 na wyjście OUT3 (S8:OUT2). Nie stosuje się w tej sytuacji ograniczenie opcji 99. | |
88 |
Wejście DIN4 steruje wyjściem DOU3 | DIN4 controls DOUT3 output (S8:OUT2) | Włączenie opcji powoduje powielanie stanu wejścia DIN4 na wyjście OUT3 (S8:OUT2). Nie stosuje się w tej sytuacji ograniczenie opcji 99. | |
89 |
Wysłanie ramki przy zmianie wyjścia VIRT3 (ChangeEvent1) | Send frame on VIRT3 change (ChangeEvent1) | Po spełnieniu warunku zdefiniowanego parametrem ChangeEvent1 zostanie natychmiast wysłana ramka z danymi. Uwaga: musi być dodatkowo spełniony warunek MinTime. Zobacz też opcję 10. | |
90 |
Wsparcie do przystawki CAN-JBUS | Support for JBUS-CAN converter | Wsparcie dla przystawki CAN BT 5.0 Flex, pozwalająca na obsługę dodatkowego interfejsu CAN (Uwaga: wspomniana przystawka rozszerza funkcjonalność o obsługę zarówno CAN jak i BT, ale ta opcja aktywuje tylko wsparcie interfejsu CAN. Dla aktywacji rozszerzenia Bluetooth zobacz opcję 128). Działa również z przystawką AndroidPlug. | |
91 |
Kompresja danych GPRS | GPRS data compression | Po włączeniu opcji ramka z danymi poddawana jest dodatkowej kompresji w celu zminimalizowania ilości transmitowanych danych. | |
92 |
Sygnalizacja wystąpienia ChangeEvent1 na OUT3 | Signal ChangeEvent1 on OUT3 (S8:OUT2) | Wyjście OUT3 (S8:OUT2) zostanie aktywowane w przypadku spełnienia warunku zdefiniowanego parametrem ChangeEvent1. Zobacz też opcję 99. | |
93 |
Wysłanie ramki przy zmianie wyjścia VIRT4 (ChangeEvent2) | Send frame on VIRT4 change (ChangeEvent2) | Po spełnieniu warunku zdefiniowanego określonym parametrem ChangeEvent zostanie natychmiast wysłana ramka z danymi. Uwaga: musi być dodatkowo spełniony warunek MinTime. Zobacz też opcję 10. | |
94 |
Wysłanie ramki przy zmianie wyjścia VIRT5 (ChangeEvent3) | Send frame on VIRT5 change (ChangeEvent3) | ||
95 |
Wysłanie ramki przy zmianie wyjścia VIRT6 (ChangeEvent4) | Send frame on VIRT6 change (ChangeEvent4) | ||
96 |
Sygnalizacja wystąpienia ChangeEvent2 na OUT3 | Signal ChangeEvent2 on OUT3 (S8:OUT2) | Wyjście OUT3 (S8:OUT2) zostanie aktywowane w przypadku spełnienia warunku zdefiniowanego odpowiednim parametrem ChangeEvent. Zobacz też opcję 99. | |
97 |
Sygnalizacja wystąpienia ChangeEvent3 na OUT3 | Signal ChangeEvent3 on OUT3 (S8:OUT2) | ||
98 |
Sygnalizacja wystąpienia ChangeEvent4 na OUT3 | Signal ChangeEvent4 on OUT3 (S8:OUT2) | ||
99 |
Ograniczenie sygnalizacji na OUT3 do 30 sekund | Limitation of signaling on OUT3 (S8:OUT2) to 30 seconds | Wyjście OUT3 (S8:OUT2) często w urządzeniu jest wykorzystywane jako wyjście sygnalizacyjne (patrz opcje: 19, 79, 92, 96, 97, 98, 102, 112, 132). Włączenie tej opcji powoduje, że sygnalizacja na tym wyjściu nie będzie trwała dłużej niż 30 sekund. | |
100 |
Tryb jazdy prywatnej gdy brak autoryzacji | Private mode when unauthorized | Opcja włącza tryb jazdy prywatnej jeśli brak autoryzacji. Można ją łączyć z opcją 101. Porównaj z opcją 51. Zobacz też opcje: 101 i 102. | |
101 |
Tryb jazdy prywatnej wg wejścia DIN1 | Private mode on DIN1 input | Opcja włącza tryb jazdy prywatnej jeśli na wejściu DIN1 jest stan wysoki. Można ją łączyć z opcją 100. Porównaj z opcją 51. Zobacz też opcje: 100 i 102. | |
102 |
Sygnalizacja jazdy prywatnej na DOUT3 (S8:OUT2) | Signal private mode on OUT3 (S8:OUT2) | Jeśli tryb jazdy prywatnej jest aktywny, wyjście OUT3 (S8:OUT2) ustawiane jest w stan wysoki. Zobacz też opcje: 99, 100 i 101 | |
103 |
Wysłanie ramki przy zmianie wyjścia VIRT7 (tryb jazdy prywatnej) | Send frame on VIRT7 change (private mode) | Powoduje wysłanie ramki od razu po zmianie włączeniu lub wyłączeniu trybu jazdy prywatnej. Bieże pod uwagę parametr MinTime. | |
104 |
Aktywuj wyjście DOUT3 | Activate OUT3 output (S8 only)/Skaut5PRO version with RS232 | W Skaut8 przestawia wyjście OUT3 do pracy jako wyjście cyfrowe sygnalizujące stan pracy urządzenia (domyślnie pracuje jako RS232). W Skaut5PRO z portem RS232 działa odwrotnie - domyślnie OUT3 działa jako wyjście, a po włączeniu opcji pracuje jako RS232. | |
105 |
Kopiuj wyjście DOUT1 na OUT0(+) (tylko S8) | Copy DOUT1 to DOUT0(+) (S8 only) | Powiela stan wyjście OUT1 nd OUT0. OUT0 jest sterowane plusem, dlatego pozwala na alternatywne sterowanie urządzeniami. | |
106 |
Kopiuj wyjście DOUT2 na OUT0(+) (tylko S8) | Copy DOUT2 to DOUT0(+) (S8 only) | Powiela stan wyjście OUT2 nd OUT0. OUT0 jest sterowane plusem, dlatego pozwala na alternatywne sterowanie urządzeniami. | |
107 |
Neguj wyjście DOUT0(+) (tylko S8) | Negate OUT0(+) output (S8 only) | Odwrócenie logiki działania wyjścia OUT0 (sterowane +) | |
108 |
Tryb TachoReader-Bridge | TachoReader-Bridge mode | (Dotyczy tachografów) Aktywuje wbudowany tryb bridge dla tachografu. Ten tryb wymagał wpięcia rejestratora pomiędzy tachograf i magistralę (wymaga zajęcia obu wejść CAN). Cała transmisja jest przekazywana do tachografu, z wyjątkiem zrzutów plików przez rejestrator, kiedy to "zewnętrzne" ramki są blokowane. | |
109 |
Alternatywny adres CAN dla funkcji TachoReader | Alternative CAN address for TachoReader function | (Dotyczy tachografów) Powoduje, że rejestrator do komunikacji z tachografem wykorzystuje adres inny niż domyślny. Pozwala to na uniknięcie problemów z komunikacją jeśli w instalacji jest podłączone inne urządzenie z takim samym adresem. Funkcja pomocna głównie przy tachografach VDO (Stoneridge zwykle całą komunikację traktuje tak samo, niezależnie z jakiego adresu przychodzi). | |
110 |
Używaj czasu z CAN w strumieniu 'activity' | Use time from CAN in 'activity' stream | Razem z opcją 64 określa skąd pobierać czas do aktywności kierowcy (same aktywności określone są filtrem, ale czas brany jest wg tych opcji). Ta opcja brana jest pod uwagę wyłącznie jeśli opcja 64 jest włączona. Wówczas: opcja włączona powoduje pobranie czasu z CAN, opcja wyłączona powoduje pobranie czasu z D8. | |
111 |
Wsparcie dla przystawki TRIGGER | Support for TRIGGER attachment | W Skaut6 opcja włączała wsparcie dla przystawki Trigger, powodującej wybudzanie rejestratora. W późniejszych wersjach jest to funkcja wbudowana i aktywacja opcji powoduje, że natychmiast po wyłączeniu stacyjki rejestrator przechodzi w stan uśpienia, pod warunkiem poprawnej pozycji GPS. Jeśli w ciągu 5 minut nie uda się złapać poprawnej lokalizacji, rejestrator wyłączy się mimo to. Porównaj opcję 26. | |
112 |
Sygnalizacja autoryzacji na OUT3 | Signal authorization on OUT3 (S8:OUT2) | Po poprawnej autoryzacji rejestrator wystawia zwiera wyjście OUT3 (S8:OUT2). Porównaj też opcję: 164 jeśli chcesz użyć wyjścia sterowanego plusem. Zobacz też opcję 99. | |
113 |
Włącz terminator na CAN1 | Enable CAN1 terminator | Opcja włącza terminator magistrali na CAN1. Wejście CAN1 domyślnie nie jest terminowane. | |
114 |
Wyłącz terminator na CAN2 | Disable CAN2 terminator | Opcja wyłącza terminator magistrali na CAN2. Wejście CAN2 domyślnie jest terminowane. | |
115 |
Wybudzanie aktywnością na CAN1 | Wake up by CAN1 activity | Po uśpieniu rejestrator będzie wybudzany jeśli pojawi się komunikacja na odpowiedniej magistrali CAN | |
116 |
Wybudzanie aktywnością na CAN2 | Wake up by CAN2 activity | ||
117 |
Wybudzanie aktywnością na JBUS | Wake up by JBUS activity | ||
118 |
Tryb obniżonego poboru mocy CAN | CAN low power mode | Podczas uśpienia w tryb obniżonego poboru prądu przełączany jest również sterownik wewnętrzny. Pobór prądu jest mniejszy, ale wybudzanie po CAN może być mniej czułe. | |
119 |
Uzupełniaj czas GPS z RTC | Complement GPS time with RTC | Jeśli urządzenie nie pobrało czasu na podstawie GPS, to przy wysyłaniu ramki uzupełni te dane czasem zsynchronizowanym z serwera (RTC) | |
120 |
Wsparcie dla LoRaFlex | Support for LoRaFlex | Włącza wsparcie dla przystawki LoRaFlex do komunikacji LoRa. | |
121 |
Ładuj baterię niezależnie od stanu stacyjki | Charge battery regardless of ignition status | Po włączeniu wewnętrzny akumulator rejestratora ładuje się bez względu na stan stacyjki. Stosowana w pojazdach bez stacyjki, np naczepach. Domyślnie ładowanie akumulatora następuje tylko przy włączonej stacyjce. | |
122 |
Funkcja TrailerID na DIN/DOUT | TrailerID function on DIN/DOUT | (Funkcja dedykowana) Po włączeniu dwa rejestratory (na obu należy włączyć tą opcję) pracują w parze, przy czym jeden (Skaut5 zainstalowany w naczepie) nadaje na wyjściu OUT1, a drugi (Skaut8 zainstalowany w ciągniku) odbiera komunikację na wejściu DIN2. Rejestrator wysyłający podaje swój identyfikator (32 bitowy ID procesora widoczny na zakładce firmware jako UID), a odbierający wysyła go w danych TrailerID. | |
123 |
Obsługa ramienia do kontenerów na AIN3 i AIN4 | Container arm support for AIN3 and AIN4 | Funkcja przygotowana dla dźwigów do załadunku kontenerów. Dane analogowe z joysticka sterowania ramieniem, podpięte pod wejścia AIN3 i AIN4, są konwertowane na dane cyfrowe wejść DIN6-7. Domyślnie jako wartości progowe to odpowiednio 4V i 8V, ale może to być zmienione przez dodanie parametru DinLevel. | |
124 |
Obługa chłodni ThermoKing | Support for ThermoKing refrigerator | Powoduje pobieranie temperatury z chłodni ThermoKing przez wejście RS232. Może wykorzystywać port szeregowy przystawki RS232 Flex F1 (jeśli zaznaczono opcję 130) lub port wbudowany (D8+DOUT3, patrz instrukcja Skaut). | |
125 |
Obsługa chłodni Carrier P1 | Support for Carrier P1 refrigerator | Powoduje pobieranie temperatury z chłodni Carrier (protokół typu 1) przez wejście RS232. Może wykorzystywać port szeregowy przystawki RS232 Flex F1 (jeśli zaznaczono opcję 130) lub port wbudowany (D8+DOUT3, patrz instrukcja Skaut). | |
126 |
Obsługa chłodni Carrier P2 | Support for Carrier P2 refrigerator | Powoduje pobieranie temperatury z chłodni Carrier (protokół typu 2) przez wejście RS232. Może wykorzystywać port szeregowy przystawki RS232 Flex F1 (jeśli zaznaczono opcję 130) lub port wbudowany (D8+DOUT3, patrz instrukcja Skaut). | |
127 |
Tryb A-GPS | A-GPS mode | Używanie poprawek różnicowych A-GPS. Wymaga wsprawcia serwera, który musi samodzielnie pobierać cyklicznie informacji od dostawcy danych (np. uBlox) i udostępniać rejestratorowi. | |
128 |
Wsparcie dla konwertera JBUS-BLE | Support for the JBUS-BLE converter | Wsparcie dla przystawki CAN BT 5.0 Flex, pozwalająca na obsługę Bluetooth. Uwaga: wspomniana przystawka rozszerza funkcjonalność o obsługę zarówno CAN jak i BT, ale ta opcja aktywuje tylko wsparcie interfejsu Bluetooth. Dla aktywacji rozszerzenia CAN zobacz opcję 90. | |
129 |
SPN247 na podstawie stacyjki | APN247 based on ignition | Czas pracy (APN247) będzie liczony wprost na podstawie stanu stacyki. | |
130 |
Wsparcie dla konwertera JBUS-RS232 | Support for JBUS-RS232 converter | Zapewnia wsparcie dla komunikacji z przystawkami RS232 Flex F1. Przystawki te pozwalają na komunikację z urządzeniami po RS232. Zobacz też opcję 145. | |
131 |
Wsparcie dla eTOLL | Support for eTOLL | (Dotyczy eTOLL) Włączenie opcji jest wymagane aby rejestrator uruchomił kanał wysyłania danych eTOLL. Zobacz też opcje: 132, 134 i 136 oraz parametr eTollMode | |
132 |
Sygnalizacja eTOLL na DOUT3 | Signal eTOLL on OUT0 (S8:OUT3) | (Dotyczy eTOLL) Włączenie włącza sygnalizację statusu funkcji eTOLL na OUT0 (S8:OUT3). Standardowo używana do podłączenia diody syanglizacyjnej. Zobacz też opcje: 99, 131 i 134. | |
133 |
Pobieranie danych z CAN według stacyjki | Data collection from CAN based on ignition | Po włączeniu opcji analiza danych CAN zależna jest od stacyjki. Dane nie są pobierane przy wyłączonej stacyjce oraz 10 sekund po włączeniu. Pomaga to uniknąć przypadkowych lub nieustalonych danych w niektórych instalacjach. | |
134 |
Sygnalizacja akustyczna naliczeń eTOLL na DOUT0 | Acoustic signaling of eTOLL charges on OUT1 (S8:OUT0+) | (Dotyczy eTOLL) Po naliczeniu opłaty za przejazd, jeśli serwer wyśle powiadomienie do rejestratora, sygnalizowane jest to na wyjściu OUT1 (S8:OUT0, sterowane plusem). Zobacz też opcje: 131 i 132. | |
135 |
Tryb Smart-GPS | Smart-GPS mode | Jeśli stacyjka będzie wyłączona, to rejestrator nie będzie wysyłał niewielkich zmian pozycji GPS. Funkcja pozwala uniknąć "pływania" lokalizacji przy postoju samochodu, które wynika z błędów w dokładności systemu GPS. | |
136 |
Rejestruj dane tylko w Polsce | Collect data only in Poland | Opcja na potrzeby eTOLL, ale można ją stosować również niezależnie. Po włączeniu opcji rejestrator nie wysyła danych spoza Polski (ustalonej obrysem wg wytycznych KAS dla eTOLL). Ramki nie są wysyłane wg charmonogramu ustalonego parametrami MaxTime, MinTime, MaxDistance i MaxAngle, ale mogą być wysłane na żądanie (np. opcjami 1, 2, 3 itp.). | |
137 |
Ukryj współrzędne GPS | Hide GPS coordinates | Po włączeniu ramki nie będą zawierały lokalizacji. Wszystkie inne dane pomiarowe będą dostępne. Będą też wysyłane dane lokalizacyjne do eTOLL. | |
138 |
Czytaj RFID jednokrotnie | Read RFID once | Po poprawnej autoryzazji ignorowane są wyszytkie inne przyłożenia kart lub pastylek aż do momentu rozautoryzowania. Pomaga to uniknąć problemów z przypadkowymi przyłożeniami w trakcie jazdy. | |
139 |
Krótkie odpowiedzi SMS | Short SMS replies | Odpowiadając na SMS stosowane są wyłącznie krótkie odpowiedzi, czyli z pominięciem nazwy parametru. W Skaut5 takie odpowiedzi są domyślne. | |
140 |
SPN235 na podstawie prędkości i stacyjki | SPN235 based on speed and ignition | Czas pracy jałowej (idle time) obliczany jest dla stanu: włączona stacyjka i prędkość GPS < 5 km/h. Zobacz też opcję 157. | |
141 |
SPN250 na podstawie ShadowAcc1 | SPN250 based on ShadowAcc1 | Skumulowane paliwo liczone jest na podstawie chwilowego zużycia skonfigurowanego w dedykowanym parametrze ShadowAcc1 (parametr 20002 w filtrach CAN). | |
142 |
DIN2 steruje wyjściem OUT2 | DIN2 controls OUT2 output (S8 only) | Stan na wejściu DIN2 przekazywany jest wprost na OUT2. | |
143 |
DIN5 steruje wyjściem OUT2 | DIN5 controls OUT2 output (S8 only) | Stan na wejściu DIN5 przekazywany jest wprost na OUT2. | |
144 |
Tryb pasywny BLE | BLE passive mode | Po włączeniu opcji rejestrator korzysta wyłącznie z trybu pasywnego Bluetooth. Ten tryb jest bardziej wydajny i wystarczy dla większości urządzeń, ale nie odpytuje o niektóre dane. Takie dodatkowe dane wysyłają np. moduły ELA (stan baterii), dlatego ELA wymaga wyłączenia tej opcji. | |
145 |
Wsparcie dla EN15430 | Support for EN15430 | Wsparcie dla przystawki RS232Flex F1 (odczyt danych z posypywarek, polewaczek itp.). Wymaga dodatkowo włączenia opcji 130 i zdefiniowania odpowiednich filtrów JBUS od odczytu parametrów. Zobacz też opcję 130. | |
146 |
Monitorowanie drzwi na IN1/OUT2 | Door monitoring on IN1/OUT2 (S8 only) | (Funkcja dedykowana) Po otwarciu drzwi (DIN1) należy włączyć stacyjkę i zrobić autoryzację. Brak zachowania tej kolejności powoduje włączenie OUT2 (alarm). Funkcja powstała do zabezpieczenia przed kradzieżą w konkretnych sytuacjach. | |
147 |
Tylko krótkie ramki | Short frames only | (Tryb kompatybilności) Używa do transmisji wyłącznie ramek o długości max. 256B. Od firmware 364 (marzec 2023) długość ramki została wydłużona do 512B. Opcja stosowana przejściowo dla zapewnienia kompatybilności we współpracy z serwerami bez obsługi długich ramek. | |
148 |
Przeplywonierz na DIN2/3 (tylko S8) | Flow meter on DIN2/3 (S8 only) | (Dotyczy przepływomierzy) Stosuje algorytm sprawdzania stosowany w przepływomierza dwukanałowego, podłączonego do wejść DIN2 i DIN3. | |
149 |
Przeplywonierz na DIN4/5 (tylko S8) | Flow meter on DIN4/5 (S8 only) | (Dotyczy przepływomierzy) Stosuje algorytm sprawdzania stosowany w przepływomierza dwukanałowego, podłączonego do wejść DIN4 i DIN5. | |
150 |
Wsparcie dla sond Aplisens (1200 bps) | Support for Aplisens probes (1200 bps) | (Dotyczy sond Aplisens) Włącza wsparcie dla sondy Aplisens na prędkości 1200 bps. Uwaga: magistrala JBUS przełączana jest wtedy w tryb RS485, dlatego nie będą działać inne urządzenia pracujące na JBUS. Zobacz też opcje 32 i 33. | |
151 |
Rożnica przepływów na DIN2/3 (tylko S8) | Flow difference on DIN2/3 (S8 only) | (Dotyczy przepływomierzy) Po zaznaczeniu tej opcji zamiast surowych wartości liczników DIN2 i DIN3 wysyłane są ich różnice: DIN2=DIN2-DIN3, DIN3=DIN3-DIN2. Umożliwia obliczanie np. różnic w przepływie paliwa na zasilaniu i powrocie. Zobacz też opcję: 152. | |
152 |
Rożnica przepływów na DIN4/5 (tylko S8) | Flow difference on DIN4/5 (S8 only) | (Dotyczy przepływomierzy) Po zaznaczeniu tej opcji zamiast surowych wartości liczników DIN4 i DIN5 wysyłane są ich różnice: DIN4=DIN4-DIN5, DIN5=DIN5-DIN4. Umożliwia obliczanie np. różnic w przepływie paliwa na zasilaniu i powrocie. Zobacz też opcję: 151. | |
153 |
Wsparcie dla skrzynek FUELBOX (tylko S8) | FUELBOX support (S8 only) | (Dotyczy Fuelbox) Włączenie powoduje przełączenie rejestratora w tryb pracy Fuelbox (dotyczy tylko 'nowych' skrzynek z Skaut 8). W tym trybie wyjścia przełączane są w tryb sygnalizacji stanów pracy pompy, diód sygnalizacyjnych itp. właściwych dla Fuelbox. | |
154 |
Logowanie stanu GSM do UserInt (tylko S8) | GSM status logging in UserInt (S8 only) | (Opcja diagnostyczna) Po włączeniu w parametrze UserInt zapisywane są stany pracy modemu. Funkcja może być pomocna przy wyszukiwaniu problemów związanych z pracą modemu. | |
155 |
Odpytywanie sond Perpetuum o status (tylko S8) | Polling status of Perpetuum fuel probes (S8 only) | (Dotyczy sond Perpetuum) Włącza odpytywanie o status sond paliwa Perpetuum. Status taki może być pomocny przy analizie uszkodzeń sondy. Żeby odczytać wartość pobranego statusu, należy samodzielnie ustawić sobie filtr JBUS. Żeby zadziałałą, musi być również włączona opcja 31. | |
156 |
Spn247 na podstawie Virt1OnTimer i Virt1OffTimer | SPN247 based on Virt1OnTimer and Virt1OffTimer | W miejsce SPN247 (work time) wkłada czas pracy zdarzenia ChangeEvent1. Można w ten sposób zliczać motogodziny na podstawie obrotów silnika itp. | |
157 |
Spn235 na podstawie Virt1OnTimer | SPN235 based on Virt1OnTimer | W miejsce SPN235 (idle time) wkłada czas pracy zdarzenia ChangeEvent1. Można w ten sposób zliczać czas biegu jałowego na podstawie obrotów silnika itp. Zobacz też opcję 140. | |
158 |
Preferuj 2G zamiast 4G | Prefer 2G over 4G | (Dotyczy modemu LTE) Modem preferuje połączenie po GPRS (2G) zamiast 4G (LTE). Zawsze najpierw próbuje to pierwsze. Zobacz też opcje: 166, 175. | |
159 |
Wysyłaj listę urządzeń Bluetooth w zasięgu | Send list of Bluetooth devices in range | Po zaznaczeniu rejestrator wysyła na serwer listę adresów MAC będących w zasięgu. Robi to w interwałach czasowych określonych parametrem DeviceID (czas w sekundach). Uwaga: parametr DeviceID jest konieczny do działania tej funkcji. |
|
160 |
Podwójna autoryzacja | Dual authorization | Do poprawnej autoryzacji wymagane jest przyłożenie dwóch kart i obie muszą być na białej liście. Zobacz też opcję: 162. | |
161 |
Usypianie po wyłaczeniu zasilania | Sleep after power off | Po spadku napięcia zasilania rejestratora poniżej określonej wartości (ok. 10.2V), przechodzi on w stan uśpienia. Wartość ta odpowiada w przybliżeniu stanowi rozładowania akumulatora samochodowego i pozwala zapobiec dalszemu rozładowaniu. | |
162 |
Autoryzuje pierwsza karta | First card authorizes | (Wymaga opcji 160) Opcja powoduje, że do czytnika można przyłożyć dwie karty, ale wystarczy pierwsza z nich, aby dokonać poprawnej autoryzacji. W efekcie autoryzuje tylko pierwsza karta, ale jest informacja o dwóch kierowcach. | |
163 |
Wsparcie dla TrailerID_V2 JBUS | Support for TrailerID_V2 JBUS | Po zaznaczeniu opcji rejestrator komunikuje się z TrailerID v2. Dla wersji v1 zobacz opcję 73. | |
164 |
Sygnalizacja autoryzacji na OUT0 (tylko S8) | Signal authorization on OUT0 (S8 only) | Po poprawnej autoryzacji rejestrator wystawia stan wysoki na OUT0. Dzięki temu można sygnalizować lub włączać urządzenia tylko po poprawnej autoryzacji. Zobacz też opcję: 112 jeśli chcesz użyć wyjścia sterowanego masą. | |
165 |
Stosuj autoryzację tachografu zawsze aplikacją GEN.1 | Force tachograph authorization with GEN.1 application only | (Dotyczy tachografu) Włączenie opcji wymusza autoryzację przy użyciu trybu 1. System Skaut ma swój programowy odpowiednik tej funkcji. | |
166 |
Praca modemu tylko w 2G | Force 2G mode only | Włączenie opcji powoduje, że modem pracuje wyłącznie w trybie 2G. Dotczy tylko rejestratorów wyposażonych w modemy umożliwiające pracę w różnych trybach. Zobacz też opcje: 158, 175. | 8.xxx.420 |
167 |
Autoryzacja blokuje uśpienie | Authorization blocks sleep | Po włączeniu opcji rejestrator nie przejdzie w stan uśpienia dopóki jest aktywna autoryzacja. Przy wyłączonej opcji rejestrator usypia się jeśli spełnione są do tego warunki, bez sprawdzania autoryzacji, co może skutować tym, że informacja o wyłączeniu autoryzacji będzie przekazana z opóźnieniem - dopiero po ponownym włączeniu rejestratora. | |
168 |
Odpytywanie o VIN naczepy Knorr | Polling for VIN of Knorr trailer | Rejestrator będzie odpytywał po CAN1 o VIN korzystając z protokołu naczep Knorr. Odpytywanie realizowane jest po włączeniu stacyjki i później raz na godzinę, a dane wysyłane w polu TrailerTAG. Uwaga: wymaga stałego podpięcia pod magistralę aby umożliwić wysłanie zapytania. | |
169 |
Odpytywanie o ID naczepy Wabco | Polling for ID of Wabco modulator | Rejestrator będzie odpytywał po CAN1 o ID korzystając z protokołu naczep Wabco. Odpytywanie realizowane jest po włączeniu stacyjki i później raz na godzinę, a dane wysyłane w polu TrailerTAG. Uwaga: wymaga stałego podpięcia pod magistralę aby umożliwić wysłanie zapytania. | |
170 |
Odpytywanie o SN modulatora Wabco | Polling for SN of Wabco modulator | Rejestrator będzie odpytywał po CAN1 o SN korzystając z protokołu modulatora Wabco. Odpytywanie realizowane jest po włączeniu stacyjki i później raz na godzinę, a dane wysyłane w polu TrailerTAG. Uwaga: wymaga stałego podpięcia pod magistralę aby umożliwić wysłanie zapytania. | |
171 |
Czas z D8 w polu UTCTime | Time from D8 in UTCTime field | Pole UTCTime jest uzupełniane czasem z D8 (uwaga: konsekwencją korzystania z czasu D8 jest to, że jest on zamrażany po wyłączeniu stacyjki). Domyślnie pole to jest synchronizowane czasem z serwera w momencie nawiązywania połączenia. | |
172 |
Sygnalizacjia stacyjki na OUT0 | Signal ignition on OUT0 | Włączenie stacyjki powoduje wystawienie stanu wysokiego na wyjściu DOUT0. Można w ten sposób np. wysterowywać lub zasilać urządzenia dodatkowe tylko przy włączonej stacyjce. | |
173 |
Fuelbox: autoryzacja dwiema listami | Fuelbox: authorization with two lists | (Dotyczy tankomatów) Po włączeniu tej opcji lista Dallas z konfiguracji i lista Dallas z firmware traktowane są rozłącznie: jedna jako dyspozytor i druga jako kierowca. Do pełnej autoryzacji wymagana jest zgodność kart z obiema listami. Domyślne zachowanie traktuje te listy jako jedna wspólna. | |
174 |
Synchronizacja komunikacji tacho z innymi urządzeniami | Synchronize tacho communiation with other equipment | (Dotyczy Stoneridge) Po włączeniu tej opcji rejestrator nasłuchuje komunikacji tachografu z innymi urządzeniami i próbuje dostosować swoją komunikację do momentów ciszy na magistrali. | 10.xxx.440 |
175 |
Automatyczne przełączanie między 2G i 4G | Switch between 2G and 4G modes | W urządzeniach z modemami 2G/4G domyślnie wybór sieci realizowany jest przez modem. Jednak w niektórych sytuacjach wybór automatyczny nie działa, co skutkuje problemem z połączeniem. Włączenie tej opcji powoduje, że jeśli przez określony czas nie da się połączyć z serwerem w jednym trybie, modem jest ręcznie przełączany do drugiego. Zobacz też opcje: 158, 166. | 8.xxx.442 |
176 |
Zapominaj aktywności kierowcy po wyłączeniu stacyjki | Forget driver activity on ignition off | Po wyłączeniu stacyjki aktywności tacho kierowcy są zerowane. Ma to zapobiec sytuacji, kiedy po wyłączeniu stacyjki ostatnia aktywność tacho jest zapamiętywana, co może skutkować np. błędnym stanem pracy trwającym przez weekend. | 8.xxx.444, 10.xxx.442 |
177 |
Rezystor podciągający na DIN4,5 | Pull-up on DIN4,5 | (Tylko Skaut10+) Włącza rezystory podciągające na DIN4 i DIN5. Dzięki temu wejścia stają się uniwersalne: domyślnie są sterowane plusem, a po włączeniu opcji czyli po włączeniu reagują na masę. | 10.xxx.446 |
178 |
Rezystor podciągający na D8 | Pull-up on D8 bus | (Tylko Skaut10+) Włącza rezystor podciągający na magistrali D8. Mogą tege wymagać niektóre tachografy. | 10.xxx.446 |
179 |
Wyłączania zasilania CAN i JBUS po wyłączeniu stacyjki | Power off CAN and JBUS on ignition off | (Oszczędzanie energii, tylko Skaut10+) Po wyłączeniu stacyjki wyłącza zasilanie na magistralach CAN i JBUS. | 10.xxx.446 |
180 |
Wsparcie termometrów 1-wire | Support for DS18B20 | (Tylko Skaut5PRO) Włącza obsługę termometrów cyfrowych 1-wire typ DS18B20. | 10.xxx.448 |
181 |
Wsparcie dla przystawki SEO CANlog | Support for SEO CANlog | Włącza obsługę przystawki CAN od SEO po RS232. Sugerowane do obsługi nietypowych maszyn, dla których nie ma wsparcia w przystawce CAN-S (patrz opcja 182. UWAGA: opcja jest w kolizji z innymi ustawieniami korzystającymi z połączenia RS232, np. pobieraniem danych z tachografu (opcja 37) | 10.xxx.454 |
182 |
Wsparcie dla przystawki CAN-S | Support for CAN-S | Włącza obsługę przystawki CAN-S, z modułem SEO po JBUS. Zobacz też parametr | 10.xxx.464 |
183 |
Wysłanie ramki przy zmianie wyjścia VIRT8 (flaga Authorization) | Send frame on VIRT8 change (Authorization) | Powoduje wysłanie ramki po zmianie stanu autoryzacji (wysłanie numeru karty nie musi oznaczać pomyślnej autoryzacji - patrz autoryzacja). Bierze dodatkowo pod uwagę parametr MinTime. | 10.xxx.464 |
184 |
Włączenie zdalnego dostępu dla DOUT0 | Activate remote DOUT0 output | Wejście DOUT w Skaut-9 może być sterowane zdalnie zamiast logiką rejestratora | 9.xxx.170 |
185 |
Czas pobierany z EN15430 | Time from EN15430 in UTCTime field | Czas pobierany z protokołu EN15430 | |
186 |
Precyzyjny pomiar przebiegu z GPS | Precise mileage on GPS | Precyzyjny pomiar przejechanego dystansu na podstawie GPS (funkcja dla wagonów) | 11.xxx.134 |
187 |
Wsparcie dla przystawki MCT001 | MCT001 support | Wsparcie przystawki pomiaru temperatury MCT001 po RS232 | 9.xxx.174 (brak wsparcia w innych typach rejestratorów) |
188 |
Wsparcie dla EBS | EBS support | Odczytuje ID naczepy z EBS | 8.xxx.466, 10.xxx.486 |
189 |
Watchdog CAN1 | CAN1 Watchdog | Przy włączonej stacyjce i braku danych na określonej magistrali restartuje urządzenie. Zobacz też opcję 54 | 8.xxx.470, 10.xxx.490 |
190 |
Watchdog CAN2 | CAN2 Watchdog | ||
¶ Parametr Ignition
Parametr służy do określenia źródła sygnału stacyjki. Wiele funkcji rejestratora uzależniona jest od wartości stacyjki, dlatego istotne jest poprawne zdefiniowania tego parametru.
Uwaga: Parametr zawsze przyjmuje 4 argumenty. Jeśli w tabeli opisano argument jako nieużywany, to nie pomijamy go, tylko wpisujemy w tym miejscu wartość 0.
| Ignition | ||||
|---|---|---|---|---|
| Arg.1 | Arg.2 | Arg.3 | Arg.4 | Opis |
| 1 | TIME | (nieużywany) | (nieużywany) | Stacyjka na podstawie stanu wejścia DIN0. TIME określa czas nieczułości (w sekundach) stanu stacyjki na chwilowe zera na wejściu DIN0 |
| 2 | TIME | VON | VOFF | Stacyjka na podstawie napięcia zasilania POWER.VON określa napięcie powyżej którego stacyjka ustawiana jest na 1, VOFF napięcie poniżej którego ustawiana jest na 0, TIME czas nieczułości (w sekundach) na warunek ustawiający 0 |
| 3 | TIME | SON | SOFF | Stacyjka na podstawie prędkości z pola KPH. SON określa prędkość powyżej której stacyjka ustawiana jest na 1, SOFF prędkość poniżej której ustawiana jest na 0, TIME czas nieczułości (w sekundach) na warunek ustawiający 0 |
| 4 | TIME | (nieużywany) | (nieużywany) | Stacyjka na podstawie stanu magistrali CAN. TIME określa czas nieczułości algorytmu w obu kierunkach czyli przy zmianie na 1 przy wykryciu aktywności na CAN, oraz przy zmianie na 0 przy detekcji braku aktywności na magistrali CAN pojazdu |
| 5 | TIME | SON | SOFF | Stacyjka na podstawie prędkości z pola SPN84. SON określa prędkość powyżej której stacyjka ustawiana jest na 1, SOFF prędkość poniżej której ustawiana jest na 0, TIME czas nieczułości (w sekundach) na warunek ustawiający 0” |
| 6 | TIME | (nieużywany) | (nieużywany) | Stacyjka na podstawie stanu wejścia DIN1. TIME określa czas nieczułości (w sekundach) stanu stacyjki na chwilowe zera na wejściu DIN0 |
| 7 | TIME | (nieużywany) | (nieużywany) | Stacyjka na podstawie stanu wejścia DIN2. TIME określa czas nieczułości (w sekundach) stanu stacyjki na chwilowe zera na wejściu DIN0 |
| 8 | TIME | (nieużywany) | (nieużywany) | Stacyjka na podstawie stanu wejścia DIN3. TIME określa czas nieczułości (w sekundach) stanu stacyjki na chwilowe zera na wejściu DIN0 |
| 9 | TIME | (nieużywany) | (nieużywany) | Stacyjka na podstawie stanu akcelerometru. TIME określa czas nieczułości (w sekundach) stanu stacyjki na chwilowy brak aktywności z akcelerometru |
| 10 | TIME | SON | SOFF | Stacyjka na podstawie prędkości z pola KPH lub alcelerometru. SON określa prędkość powyżej której stacyjka ustawiana jest na 1, SOFF prędkość poniżej której ustawiana jest na 0, TIME czas nieczułości (w sekundach) na warunek ustawiający 0 |
| 11 | TIME | ON | OFF | Stacyjka na podstawie danej z SPN3484. ON określa wartość (0-255) od której stacyjka ustawiana jest na 1, OFF wartość (0-255) powyżej której ustawiana jest z powrotem na 0, TIME czas nieczułości (w sekundach) na warunki ustawiające 0 |
| 12 | TIME | (nieużywany) | (nieużywany) | Stacyjka wg autoryzacji. Stacyjka włączona jeśli poprawna autoryzacja i wyłączona przy braku autoryzacji. |
| 13 | TIME | ON | OFF | Stacyjka wg obrotów (SPN190). Argument ON określa wartość powyżej której stacyjka będzie włączona, argument OFF to wartość poniżej której stacyjka będzie wyłączona. |
| 14 | TIME | ON | OFF | Stacyjka wg częstotliwości (FREQ0). Argument ON określa wartość powyżej której stacyjka będzie włączona, argument OFF to wartość poniżej której stacyjka będzie wyłączona. |
| 15 | TIME | KPH | POWER | Stacyjka dedykowana naczepom. Do włączenia stacyjki prędkość z GPS powinna być większa od KPH i jednocześnie napięcie zasilania większe od POWER. Stacyjka jest wyłączona jeśli wskazania są odpowiednio mniejsze od podanych wartości. |
Należy pamiętać, że argumenty IgnitionON i IgnitionOFF biorą pod uwagę warunek “większy niż” i “mniejszy niż”, czyli np. dla obrotów dla wyłączenia nie należy ustawiać wartości IgnitionOFF=0, ale np. 1.
Przykładowe ustawienie stacyjki w oparciu o obroty z CAN: Ignition=13,10,500,1.
Ustawienie IgnitionTime (w sekundach) oznacza przedłużenie działania stacyjki, ale tylko przy jej wyłączaniu, a więc pozwala na brak skoków np. przy postoju w korku.
¶ Ustawienia domyślne
Jeśli w konfiguracji nie podano parametru Ignition, to domyślnie jest stosowane ustawienie: Ignition=1,0,0,0, czyli wejście DIN0 bez żadnych opóźnień.
¶ Parametr Immobiliser
Jeśli nie podano parametru Immobiliser w konfiguracji, domyślną wartością jest
Immobiliser=0, czyli wejście DIN0.
Parametr jest sprawdzany wyłącznie przy aktywnym immibilizerze (opcja 18). W takiej sytuacji parametr Immobiliser określa wejście używane na potrzeby autoryzacji. W rzeczywistości odpowiada to funkcji stacyjki, ale używanej wyłącznie na potrzeby immobilisera. Dzięki temu można rozdzielić faktyczną stacyjkę w pojeździe od tej używanej do autoryzacji. Pozwala to na wygodną definicję w nietypowych sytuacjach, np. wprowadzenie kontroli dostępu do przestrzeni ładunkowej.
Parametr przyjmuje pojedynczą wartość liczbową, oznaczającą nr wejścia, przy czym wartości 0-7 oznaczając wprost fizyczne wejścia cyfrowe, a kolejne oznaczają wejścia wirtualne.
| Wartość | Wejście |
|---|---|
| 0 | wejścia fizyczne DIN0-7 |
| ... | |
| 7 | |
| 8 | wejścia wirtualne VIRT0-15 |
| ... | |
| 23 |
¶ Parametr OverSpeed
Poszczególne parametry mogą przyjmować następujące wartości.
| Over speed | ||||
|---|---|---|---|---|
| Arg.1 | Arg.2 | Arg.3 | Arg.4 | Opis |
| 1 | TIME | SON | SOFF | Detekcja przekroczenia prędkości z pola KPH. SON określa prędkość powyżej której flaga ustawiana jest na 1, SOFF prędkość poniżej której ustawiana jest na 0, TIME czas nieczułości (w sekundach) na oba warunki zmieniające stan flagi na przeciwny |
| 2 | TIME | SON | SOFF | Detekcja przekroczenia prędkości z pola SPN84. SON określa prędkość powyżej której flaga ustawiana jest na 1, SOFF prędkość poniżej której ustawiana jest na 0, TIME czas nieczułości (w sekundach) na oba warunki zmieniające stan flagi na przeciwny |
¶ Parametr OverTemp
Poszczególne parametry mogą przyjmować następujące wartości
| Over temp | ||||
|---|---|---|---|---|
| Arg.1 | Arg.2 | Arg.3 | Arg.4 | Opis |
| 1 | TIME | TON | TOFF | Detekcja przekroczenia temperatury z pola TEMP. TON określa temperaturę powyżej której flaga ustawiana jest na 1, TOFF temperatura poniżej której ustawiana jest na 0, TIME czas nieczułości (w sekundach) na oba warunki zmieniające stan flagi na przeciwny |
| 2 | TIME | TON | TOFF | Analogicznie tyle, że dotyczy pola Spn110 (Coolant Temperature) |
| 3 | TIME | TON | TOFF | Analogicznie tyle, że dotyczy pola Spn172 (Air Inlet Temp) |
| 4 | TIME | TON | TOFF | Analogicznie tyle, że dotyczy pola Spn175 (Oil Temperature) |
| 5 | TIME | TON | TOFF | Analogicznie tyle, że dotyczy pola Spn169_0 (Cargo Temperature) |
| 6 | TIME | TON | TOFF | Analogicznie tyle, że dotyczy pola Spn169_1 (Cargo Temperature) |
| 7 | TIME | TON | TOFF | Analogicznie tyle, że dotyczy pola Spn169_2 (Cargo Temperature) |
| 8 | TIME | TON | TOFF | Analogicznie tyle, że dotyczy pola Spn169_3 (Cargo Temperature) |
¶ Parametry dedykowane magistrali CAN
Grupa obejmuje parametry CanSetup, CanSetupEx oraz grupę filtrów CanFilterN i CanFilerExN. Pierwsze dwa określają parametry pracy magistral CAN, a kolejne pozwalają wyodrębnić z ramki CAN konkretny parametr w pojeździe, np. prędkość czy poziom paliwa.
Poszczególne parametry mogą przyjmować następujące wartości.
| CanSetup | |
|---|---|
| Argument 1 | Prędkość magistrali CAN w bitach na sekundę |
| Argument 2 | 0 – full/standard, 1 – full/extended, 2 – listen/standard, 3 – listen/extended |
| Argument 3 | 0 – intel/raw, 1 – intel/fms, 2 – motorola/raw, 3 – motorola/fms |
| Argument 4 | Identyfikator konfiguracji CanId |
Rejestratory Skaut7 posiadają alternatywną możliwość konfiguracji 3 interfejsów CAN.
| CanSetupEx | |
|---|---|
| Argument 1 | Identyfikator konfiguracji CanId |
| Argument 2 | Prędkość magistrali w bitach na sekundę |
| Argument 3 | 0 – full, 1 - listen |
| Argument 4 | Prędkość magistrali (Skaut7 lub z przystawki CanExt) w bitach na sekundę |
| Argument 5 | 0 – full, 1 - listen |
| Argument 6 | Prędkość magistrali (z przystawki JBUS-CAN) w bitach na sekundę |
| Argument 7 | 0 – full, 1 - listen |
Użycie powyższego parametru do konfiguracji CAN powoduje konieczność konfiguracji filtrów ramek przy pomocy alternatywnych parametrów filtrów (CanFilterEx).
Gdzie:
full– tryb pełny sterownika CANlisten– tryb „tylko do nasłuchu” sterownika CANstandard– odbiór ramek standardowych (11 bit)extended– odbiór ramek extended (29 bit)fms– wypełnianie nieużywanych danych:0xFFraw– wypełnianie nieużywanych danych:0x00intel– analiza danych w trybie intelmotorola– analiza danych w trybie motorola
Adresacja ramki w trybie INTEL.
| Pole adresu 11 (lub 29 bitów) | Pole danych od 1 do 8 bajtów (od 8 do 64 bitów) | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ADDRESS | D1 (D0) | D2 (D1) | D3 (D2) | D4 (D3) | D5 (D4) | D6 (D5) | D7 (D6) | D8 (D7) | ||||||||||
| 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 7 … 0 | 15 … 8 | 23 … 16 | 31 … 24 | 39 … 32 | 47 … 40 | 55 … 48 | 63 … 56 |
| Index bajtu, bity 7 → 0 | 0 | 8 | 16 | 24 | 32 | 40 | 48 | 56 | ||||||||||
Adresacja ramki w trybie MOTOROLA
| Pole adresu 11 (lub 29 bitów) | Pole danych od 1 do 8 bajtów (od 8 do 64 bitów) | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ADDRESS | D1 (D0) | D2 (D1) | D3 (D2) | D4 (D3) | D5 (D4) | D6 (D5) | D7 (D6) | D8 (D7) | ||||||||||
| 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 64 … 57 | 56 … 49 | 48 … 41 | 40 … 33 | 32 … 25 | 24 … 17 | 16 … 9 | 8 … 1 |
| Index bajtu, bity 7 → 0 | 64 | 56 | 48 | 40 | 32 | 24 | 16 | 8 | ||||||||||
¶ Parametry CANFilter
Poszczególne parametry mogą przyjmować następujące wartości.
| CanFilter<1..32> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Wartość adresu lub fragmentu pola adresu ramki CAN |
| Argument 4 | Od którego bitu pola adresu porównywać podaną wartość |
| Argument 5 | Ilość bitów branych pod uwagę przy operacji porównania adresów |
| Argument 6 | Wartość fragmentu pola danych ramki CAN |
| Argument 7 | Od którego bitu pola danych CAN porównywać podaną wartość |
| Argument 8 | Ilość bitów branych pod uwagę przy operacji porównania danych |
| Argument 9 | Od którego bitu pola danych CAN kopiować wynik operacji |
| Argument 10 | Ilość kopiowanych bitów pola danych zawierająca wynik operacji |
| Argument 11 | 0 – unsigned, 1 – signed(najstarsze 4 bity używane są w parametrach wirtualnych) |
| Argument 12 | Skala wyniku (mnożnik) |
| Argument 13 | Offset wyniku |
Rejestratory Skaut5N, 6 i 7 posiadają alternatywne parametry filtrów CAN.
| CanFilterEx<1..32> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Wartość adresu lub fragmentu pola adresu ramki CAN |
| Argument 4 | Od którego bitu pola adresu porównywać podaną wartość |
| Argument 5 | Ilość bitów branych pod uwagę przy operacji porównania adresów |
| Argument 6 | Wartość fragmentu pola danych ramki CAN |
| Argument 7 | Od którego bitu pola danych CAN porównywać podaną wartość |
| Argument 8 | Ilość bitów branych pod uwagę przy operacji porównania danych |
| Argument 9 | Od którego bitu pola danych CAN kopiować wynik operacji |
| Argument 10 | Ilość kopiowanych bitów pola danych zawierająca wynik operacji |
| Argument 11 | 0 – unsigned, 1 – signed |
| Argument 12 | Numer bitu (0 – 15) dla parametrów wirtualnych |
| Argument 13 | 0 – copy/standard, 1 – trigger/standard, 2 – copy/extended, 3 – trigger/extended |
| Argument 14 | 0 – intel/raw, 1 – intel/fms, 2 – motorola/raw, 3 – motorola/fms |
| Argument 15 | Skala wyniku (mnożnik) |
| Argument 16 | Offset wyniku |
| Argument 17 | Wartość minimalna |
| Argument 18 | Wartość maksymalna |
Parametry intel/motorola, raw/fms oraz standard/extended nadpisują globalne ustawienia z konfiguracji interfejsu CAN (CanSetup).
Gdzie:
unsigned– daną źródłową traktujemy jak liczbę bez znakusigned– daną źródłową traktujemy jak liczbę w kodzie U2copy– kopiuje otrzymaną wartość albo NULL, gdy jest poza zakresemtrigger– zatrzaskuje w danych pomiarowych ostatnią poprawną wartość
¶ Typy parametrów
Poniżej znajduje się tabela opisujące typy wbudowanych parametrów.
| Typy parametrów | |
|---|---|
| FLOAT | Spn190 (Engine speed) Spn84 (Wheel based speed) Spn96 (Fuel level) Spn250 (Total fuel) Spn247 (Total engine hours) Spn175 (Oil Temperature) Spn91 (Accel Pedal Position) Spn521 (Brake Pedal Pos) Spn180 (Trailer Weight) Spn181 (Cargo Weight) Spn582_0..3 (Axle Weight) Spn169_0..3 (Cargo Temperature) Spn235 (Engine Total Idle Hours) Spn1761 (Catalyst Tank Level) UserFloat1 UserFloat2 UserFloat3 UserFloat4 |
| DOUBLE | UserDouble1 UserDouble2 UserDouble3 UserDouble4 |
| INTEGER 64bit | Spn917 (Vehicle distance) UserLong1 UserLong2 UserLong3 UserLong4 |
| INTEGER 32bit | UserInt1 UserInt2 UserInt3 UserInt4 |
| INTEGER 16bit | Spn110 (Coolant Temperature) Spn172 (Air Inlet Temp) UserShort1 UserShort2 UserShort3 UserShort4 |
| INTEGER 8bit | Spn523 (Current Gear) Spn520 (Actual Retarder) Spn595 (Cruise Cntrl Active) Spn596 (Cruise Cntrl Enable) Spn1611 (Vehicle Montion) Spn1612 (Driver 1 State) Spn1613 (Driver 2 State) Spn597 (Brake Switch) Spn899 (Torque Mode) Spn513 (Percent Torque) Spn3484 (Ignition) UserChar1 UserChar2 UserChar3 UserChar4 |
¶ Wbudowane konfiguracje CAN
Parametry CanConfig i CanConfigEx oraz CanConfigMini odpowiadają za wybór jednej z wbudowanych konfiguracji CAN. Lista konfiguracji dostępna jest w dokumencie Wbudowane konfiguracje CAN.
¶ Parametry dedykowane magistrali JBUS
Poszczególne parametry mogą przyjmować następujące wartości.
| JbusFilter<1..32> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | J1708 MID |
| Argument 4 | J1708 PID |
| Argument 5 | Offset w parametrze |
| Argument 6 | Długość w parametrze |
| Argument 7 | 0 – unsigned/page0, 1 – signed/page0, 2 – unsigned/page1, 3 – signed/page1(najstarsze 4 bity używane są w parametrach wirtualnych) |
| Argument 8 | Skala wyniku (mnożnik) |
| Argument 9 | Offset wyniku |
Rejestratory Skaut5N, 6 i 7 posiadają alternatywne parametry filtrów JBUS.
| JbusFilterEx<1..32> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | J1708 MID |
| Argument 4 | J1708 PID |
| Argument 5 | Offset w parametrze |
| Argument 6 | Długość w parametrze |
| Argument 7 | 0 – unsigned/page0, 1 – signed/page0, 2 – unsigned/page1, 3 – signed/page1 |
| Argument 8 | Numer bitu (0 – 15) dla parametrów wirtualnych |
| Argument 9 | 0 – copy, 1 – trigger |
| Argument 10 | Skala wyniku (mnożnik) |
| Argument 11 | Offset wyniku |
| Argument 12 | Wartość minimalna |
| Argument 13 | Wartość maksymalna |
Gdzie:
unsigned– daną źródłową traktujemy jak liczbę bez znakusigned– daną źródłową traktujemy jak liczbę w kodzie U2page<0,1>– strona parametrów J1708 PIDcopy– kopiuje otrzymaną wartość albo NULL, gdy jest poza zakresemtrigger– zatrzaskuje w danych pomiarowych ostatnią poprawną wartość
¶ Parametry dedykowane magistrali D8
Poszczególne parametry mogą przyjmować następujące wartości.
| D8Filter<1..16> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Offset parametru |
| Argument 4 | Długość parametru |
| Argument 5 | 0 – unsigned, 1 – signed(najstarsze 4 bity używane są w parametrach wirtualnych) |
| Argument 6 | Skala wyniku (mnożnik) |
| Argument 7 | Offset wyniku |
Rejestratory Skaut5N, 6 i 7 posiadają alternatywne parametry filtrów D8.
| D8FilterEx<1..16> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Offset parametru |
| Argument 4 | Długość parametru |
| Argument 5 | 0 – unsigned, 1 – signed |
| Argument 6 | Numer bitu (0 – 15) dla parametrów wirtualnych |
| Argument 7 | 0 – copy, 1 – trigger |
| Argument 8 | Skala wyniku (mnożnik) |
| Argument 9 | Offset wyniku |
| Argument 10 | Wartość minimalna |
| Argument 11 | Wartość maksymalna |
Gdzie:
unsigned– daną źródłową traktujemy jak liczbę bez znakusigned– daną źródłową traktujemy jak liczbę w kodzie U2copy– kopiuje otrzymaną wartość alboNULL, gdy jest poza zakresemtrigger– zatrzaskuje w danych pomiarowych ostatnią poprawną wartość
¶ Dane na magistrali D8
Poniżej znajduje się opis offsetów dla poszczególnych parametrów w przypadku tachografów Siemens oraz Stoneridge.
| Offset | Siemens VDO | Stoneridge SE5000 |
|---|---|---|
| 0 | Date, byte 1 | Date & Time, byte 1 |
| 8 | Date, byte 2 | Date & Time, byte 2 |
| 16 | Date, byte 3 | Date & Time, byte 3 |
| 24 | Date, byte 4 | Date & Time, byte 4 |
| 32 | Time, byte 1 | Working State Driver 1&2 |
| 40 | Time, byte 2 | Driver 1 State |
| 48 | Time, byte 3 | Driver 2 State |
| 56 | Time, byte 4 | Tachograph status |
| 64 | Work status driver 1&2, byte 1 | Speed, byte 1 |
| 72 | Work status driver 1&2, byte 2 | Speed, byte 2 |
| 80 | Work status driver 1&2, byte 3 | Vechicle distance, byte 1 |
| 88 | Work status driver 1&2, byte 4 | Vechicle distance, byte 2 |
| 96 | Speed, byte 1 | Vechicle distance, byte 3 |
| 104 | Speed, byte 2 | Vechicle distance, byte 4 |
| 112 | Total distance, byte 1 | Trip distance, byte 1 |
| 120 | Total distance, byte 2 | Trip distance, byte 2 |
| 128 | Total distance, byte 3 | Trip distance, byte 3 |
| 136 | Total distance, byte 4 | Trip distance, byte 4 |
| 144 | Distance of current journey, byte 1 | K-factor, byte 1 |
| 152 | Distance of current journey, byte 2 | K-factor, byte 2 |
| 160 | Distance of current journey, byte 3 | Engine speed, byte 1 |
| 168 | Distance of current journey, byte 4 | Engine speed, byte 2 |
| 176 | Factor K, byte 1 | Speed Authorised, byte 1 |
| 184 | Factor K, byte 2 | Speed Authorised, byte 2 |
| 192 | Machine speed, byte 1 | Additional information |
| 200 | Machine speed, byte 2 | 0xff |
| 208 | Additional information, byte 1 | 0xff |
| 216 | Additional information, byte 2 | 0xff |
¶ Parametry dedykowane eco-driving
Konfiguracja przetwarzania wstępnego parametrów źródłowych. Obejmuje ona opis dyskretyzacji parametrów ciągłych na określoną liczbę przedziałów.
¶ Quantizer
| Quantizer <1..8> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Ilość przedziałów |
| Argument 4 | Histereza |
| Argument 5 | Start |
| Argument 6 | Koniec |
¶ Vector
Umożliwia potraktowanie parametru z określoną ilość zdefiniowanych przedziałów jako oddzielnych zdarzeń.
| Vector <1..8> | |
|---|---|
| Argument 1 | Czas pomiędzy wysłaniem danych |
| Argument 2 | Index kwantyzatora (1 – 8) |
| Argument 3 | Rodzaj parametru: 1 – TIME, 2 – DISTANCE, 3 – COUNT |
| Argument 4 | Identyfikator wektora |
¶ Matrix
Na postawie dwóch parametrów, które zostały podzielone na zdefiniowane przedziały stworzona jest dwu wymiarowa tabela ze zdarzeniami.
| Matrix <1..8> | |
|---|---|
| Argument 1 | Czas pomiędzy wysłaniem danych |
| Argument 2 | Index kwantyzatora (1 – 8) – wiersz |
| Argument 3 | Index kwantyzatora (1 – 8) – kolumna |
| Argument 4 | Rodzaj parametru: 1 – TIME, 2 – DISTANCE, 3 – COUNT |
| Argument 5 | Identyfikator macierzy |
Gdzie:
TIME– sumaryczny czas występowania parametruDISTANCE– sumaryczny dystans występowania parametruCOUNT– sumaryczna ilość wystąpień parametru
¶ Parametr Continental
Poszczególne parametry mogą przyjmować następujące wartości.
| Continental | |
|---|---|
| Argument 1 | Czas pomiędzy wysłaniem danych |
| Argument 2 | Źródło danych: 0 – OFF, 1 – , 2 – |
| Argument 3 | Opcje: 0 – nie wysyłaj gdy brak nowych danych, 1 – wysyłaj dane zawsze |
¶ Parametry ChangeEvent
Poszczególne parametry mogą przyjmować następujące wartości.
| ChangeEvent <1..4> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Opcje:1 – detekcja zmiany według ustawionych czułości2 – detekcja według ustawionych progów3 – odwrotna detekcja według ustawionych progów4 – detekcja zmiany na postoju5 – komparator okienkowy6 – odwrotny komparator okienkowy7 – komparator okienkowy dla IDLE_TIME (oblicza czas pracy pasywnej i aktywnej)8 – komparator okienkowy dla IDLE_TIME z uwzglednieniem predkości z GPS (oblicza czas pracy aktywnej i pasywnej) 9 - stop decrease |
| Argument 4 | Wartość maximum |
| Argument 5 | Wartość minimum |
W zależności od argumentu 3 sposób działania jest jak niżej. Oznaczenia w tekście oznaczają:
A- oznacza parametr mierzonyMin- parametr MinimumMax- parametr Maximum
Przy obliczaniu pracy używane są:
- praca łączna - czas pracy obejmujący pracę pasywną i aktywną
- praca pasywna - praca na biegu jałowym
- praca aktywna - praca pod obciążeniem
| Wartość | Opis |
|---|---|
| 7 | Jeśli A < Min to brak pracy; jeśli Min < A <= Max to praca pasywna; jeśli A > Max to praca aktywna.Tip: aby ustawić pracę po napięciu (nie rozróżniać pracy aktywnej i pasywnej) najlepiej ustawić Min = Max. |
| 8 | Prosto o co chodzi: obroty wysokie -> praca aktywna; obroty niskie ale się porusza -> praca aktywna; stoi na wolnych obrotach -> praca pasywna. Parametr Min opisuje prędkość z GPS, parametr Max opisuje parametr A (typowo to obroty silnika).Praca aktywna jeśli: A > Max lub prędkość > Min i Max/3 <= A < Max.Praca pasywna jeśli: prędkość < Min i Max/3 <= A < Max. Przykład zastosowania: jeśli obroty większe niż 1100 RPM lub pojazd jedzie pow. 5 km/h i jednocześnie są obroty 366-1100, to praca aktywna. Jeśli stoi lub jedzie poniżej 5 km/h i ma obroty 366-1100. |
¶ Parametry dedykowane Bluetooth
Poszczególne parametry mogą przyjmować następujące wartości.
| BLE Filter <1..16> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Adres MAC urzadzenia |
| Argument 4 | Wartość GAP pola Advertising Data |
| Argument 5 | Oczekiwana długość pola danych nie licząc bajtu GAP, 0 – długość dowolna |
| Argument 6 | Wartość fragmentu wybranego pola danych |
| Argument 7 | Od którego bitu pola danych porównywać podaną wartość |
| Argument 8 | Ilość bitów branych pod uwagę przy operacji porównania danych |
| Argument 9 | Od którego bitu pola danych kopiować wynik operacji |
| Argument 10 | Ilość kopiowanych bitów pola danych zawierająca wynik operacji |
| Argument 11 | 0 – unsigned/intel, 1 – signed/intel, 2 – unsigned/motorola, 3 – signed/motorola, 5 – signed+/intel, 7 – signed+/motorola |
| Argument 12 | Skala wyniku (mnożnik) |
| Argument 13 | Offset wyniku |
¶ Parametry dedykowane funkcji eTOLL
| eTollMode | |
|---|---|
0 |
MANUAL ONLY (DEFAULT) |
1 |
MANUAL, IGNITION |
2 |
AUTO ONLY |
3 |
AUTO, IGNITION |
4 |
MANUAL ONLY, NETWORK |
5 |
MANUAL, IGNITION, NETWORK |
6 |
AUTO ONLY, NETWORK |
7 |
AUTO, IGNITION, NETWORK |
8 |
MANUAL ONLY, BUTTON |
9 |
MANUAL, IGNITION, BUTTON |
10 |
AUTO ONLY, BUTTON |
11 |
AUTO, IGNITION, BUTTON |
12 |
MANUAL ONLY, NETWORK, BUTTON |
13 |
MANUAL, IGNITION, NETWORK, BUTTON |
14 |
AUTO ONLY, NETWORK, BUTTON |
15 |
AUTO, IGNITION, NETWORK, BUTTON |
Status opisany w poniższej tabeli nie jest parametrem konfiguracyjnym, ale statusem pracy dostępnym z zakładki Firmware.
| eToolStatus | |
|---|---|
0 |
FOREIGN, DISABLED |
1 |
POLAND, DISABLED |
2 |
FOREIGN, ENABLED |
3 |
POLAND, ENABLED |
4 |
FOREIGN, DISABLED, EXECUTE |
5 |
POLAND, DISABLED, EXECUTE |
6 |
FOREIGN, ENABLED, EXECUTE |
7 |
POLAND, ENABLED, EXECUTE |
¶ Meshtastic
| Meshtastic | |
|---|---|
| Argument 1 | Region |
| Argument 2 | Preset |
| Argument 3 | Flags |
| Argument 4 | LongName |
| Argument 5 | ShortName |
| Argument 6 | TxPower |
| Argument 7 | MaxHop |
| Argument 8 | NodeInfoTime |
| Argument 9 | TelemetryTime |
| Argument 10 | PositionTime |
¶ Parametry dedykowane CiA422
Poszczególne parametry mogą przyjmować następujące wartości.
| CiA422Filter <1..48> | |
|---|---|
| Argument 1 | Identyfikator obsługiwanego parametru (taki jak w Frame Config) |
| Argument 2 | Index konkretnego parametru (1 – 8) |
| Argument 3 | Object |
| Argument 4 | SubIndex |
| Argument 5 | Field |
| CiA422Map <1..48> | |
|---|---|
| Argument 1 | Numer PDO |
| Argument 2 | Adres ramki CAN |
| Argument 3 | Object |
| Argument 4 | SubIndex |
| Argument 5 | Field |
| Argument 6 | Od którego bitu pola danych PDO kopiować wynik operacji |
| Argument 7 | Ilość kopiowanych bitów pola danych zawierająca wynik operacji |
| Argument 8 | 0 – unsigned, 1 – signed |
| Argument 9 | Skala wyniku (mnożnik) |
| Argument 10 | Offset wyniku |
| Argument 11 | Wartość minimalna |
| Argument 12 | Wartość maksymalna |
¶ Komendy zaawansowane
Opis dotyczy poleceń dedykowanych specjalnym zastosowaniom, znajdującym się na zakładce Advanced.
| Polecenie | Opis |
|---|---|
| Mileage | |
| Digital OUT0 | |
| Digital OUT1 | |
| Digital OUT2 | |
| Digital OUT3 | |
| Immobiliser | |
| Internal Sniffer | |
| Firmware backgroud update | |
| Total work counter (SPN247) on ignition | |
| eTOLL Status | |
| eTOLL Button | Set - ustawia stan przycisku (0|1), Get - zwraca stan przycisku: 0 = wyłączony, 1 = włączony ale nie wysyła, 2 = włączony |
| Accumulated counter | |
| Virtual ON counters | |
| Virtual OFF counters | |
| Door | |
| Diagnostic mode | |
| Firmware info | |
| MCT | Pozwala zarządzać termometrami Mycronex. Dotyczy tylko Skaut 5 PRO i Skaut 13. Polecenia ma postać: <CMD>,<ARG1>,<ARG2>, gdzie: CMD=1 - dodawanie/usuwanie pastylki, CMD=2 - wysłanie zapytania, CMD=3 - pobranie ID termometru, CMD=4 - wgranie domyślnej konfiguracji |
¶ Polecenia SMS
Urządzenie pozwala na zdalną konfigurację przy użyciu wiadomości tekstowych. Wiadomość konfiguracyjna może być wysyłana przy użyciu modemu GSM lub dowolnego telefonu komórkowego. W jednej wiadomości konfiguracyjnej można zmieniać wiele parametrów. Jedynym ograniczeniem jest tutaj standardowa długość komunikatu, wynosząca 160 znaków. Wiadomość konfiguracyjną można również stosować do pobierania wartości wybranych parametrów systemu oraz aktualnego stanu wejść, pozycji, alarmu i innych standardowych wartości mierzonych.
¶ Struktura wiadomości konfiguracyjnej
Wiadomość konfiguracyjna jest zwykłą wiadomością tekstową, zawierającą listę parametrów i wartości, np.:
PIN=0000 MYID=SG79923 IP=91.126.181.46
Nazwa parametru zawsze pisana jest wielkimi literami.
Jeśli w treści wiadomości znajdzie się ciąg znaków, który nie zostanie zinterpretowany jako poprawny parametr konfiguracyjny, zostanie on pominięty. Umożliwia to konfigurację przy pomocy publicznie dostępnych serwisów internetowych, dodających do treści wiadomości różnego typu dodatki, np. reklamy.
¶ Autoryzacja
Każda wiadomość konfiguracyjna powinna zawierać kod autoryzacyjny, aby uniemożliwić konfigurowanie urządzenia innym niż uprawnione osoby. Kod autoryzacyjny jest ciągiem dokładnie 4 cyfr, ustawianych w opcji Kod PIN dla SMS programu Skaut Manager 4 lub zdalnie przy pomocy wiadomości konfiguracyjnych. Jeśli kod autoryzacyjny został uprzednio zdefiniowany i ma wartość np. 0000, należy go podać w treści wiadomości wpisując:
PIN=0000
Kod autoryzacyjny – jeśli podany – powinien być umieszczony na początku wiadomości, gdyż tylko polecenia znajdujące się za nim zostaną poprawnie zinterpretowane przez system. Żądanie kodu PIN może zostać wyłączone poprzez przypisanie do parametru Kod PIN dla SMS.
¶ Parametry
Aby zmienić wybrany parameter konfiguracyjny należy w treści wiadomości podać ciąg: Kod SMS=wartość, zaś w przypadku wielu parametrów poszczególne z nich oddzielane są spacją, np.:
PIN=0000 MYID=SG79923 IP=91.126.181.46
Urządzenie może zostać także odpytane o aktualną wartość dowolnego parametru konfiguracyjnego poprzez wpisanie ciągu: Kod SMS=?. Na numer, z którego został wysłany komunikat przyjdzie informacja zwrotna zawierająca wartości odpytywanych parametrów. W jednej wiadomości konfiguracyjnej mogą przeplatać się polecenia ustawiające i odpytujące, np.:
PIN=0000 FRAME=1,2,3,4,5,6,7,8,9 SMSPIN=4821 FRAME=? SMSPIN=?
Przy takiej strukturze wiadomości najpierw zostaną zapisane wartości parametrów FRAME i SMSPIN, a następnie nowe wartości zwrócone do nadawcy. W ten sposób wiadomość zwrotna będzie wyglądała następująco:
1,2,3,4,5,6,7,8,9 4821
Wysyłając wiele zapytań do różnych urządzeń warto pamiętać o zapytaniu także o wartość MYID. Pozwoli to nadawcy na łatwe powiązanie otrzymanego komunikatu z konkretnym urządzeniem.
Odpytywanie o parametry jest więc sposobem na otrzymywanie potwierdzeń odebrania wiadomości i zastosowania przez urządzenie wprowadzanych zmian.
Poniżej znajduje się lista dodatkowych parametrów. Ich użycie wymaga użycia w treści SMS tylko samej nazwy parametru.
| Dodatkowe polecenia SMS | |
|---|---|
| PIN=**** | Autoryzacja treści SMS kodem PIN z konfiguracji |
| RESETEXT | Resetuje przystawkę TachoReader |
| RESTART | Restartuje oprogramowanie rejestratora |
| STARTCAL | Rozpoczyna proces kalibracji czujnika MEMS |
| STOPCAL | Kończy proces kalibracji czujnika MEMS |
| DEBUGTXT | Aktywuje zapis logów z pracy urządzenia na nośniku USB |
| DEBUGCAN | Aktywuje zapis danych z CAN na nośniku USB |
| DEBUGJBUS | Aktywuje zapis danych z JBUS na nośniku USB |
| DEBUGD8 | Aktywuje zapis danych z D8 na nośniku USB |
| DEBUGOFF | Kończy zapis danych na nośniku USB (nośnik można bezpiecznie wyjąć) |
| DEBUGNEW | Wymusza utworzenie nowego pliku z logiem |
| VERSION | Odpytuje o wersję oprogramowania rejestratora |
| GSMSTATUS | Odpytuje o status modułu GSM |
| GPSSTATUS | Odpytuje o status modułu GPS |
| CANSTATUS | Odpytuje o status modułu CAN |
| BLXSTATUS | Odpytuje o status czarnej skrzynki |
| UPTIME | Odpytuje o czas pracy rejestratora |
| NETWORKCODE | Odpytuje o kod sieci GSM |
| IMMOBILISER | Odpytuje o status immobilisera |
| CONFIGSTAT | Odpytuje o status pamięci konfiguracyjnej rejestratora |
| LINK | Odpytuje o pozycję rejestratora |
| OPTIONADD | Włącza wskazaną opcję |
| OPTIONDEL | Wyłącza wskazaną opcję |
| MYID | Nazwa rejestratora |